2025
|
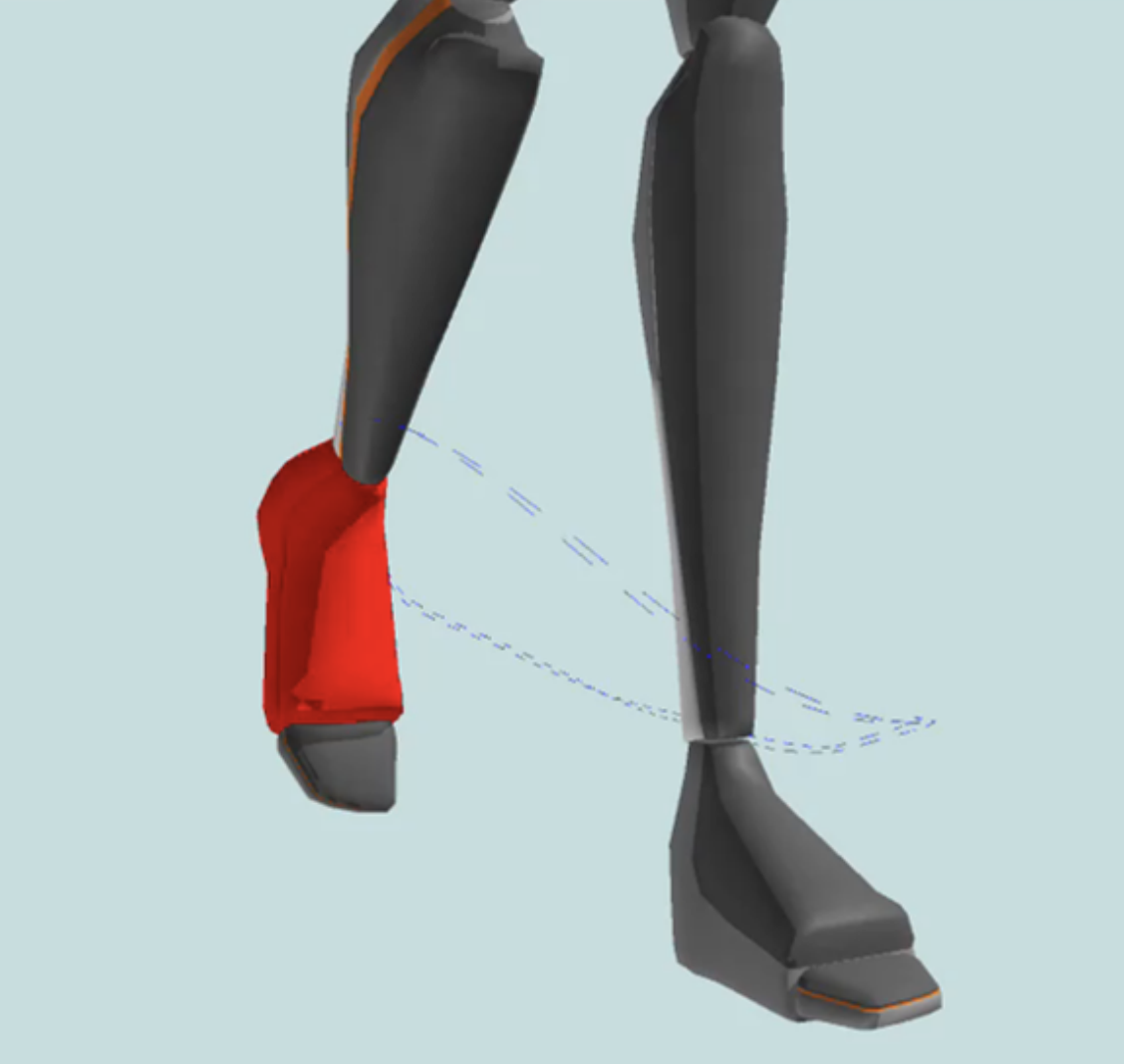
Jamsek, Marko; Rueckert, Elmar; Babic, Jan Foot Placement Prediction in Real-Time Using Probabilistic Movement Primitives Proceedings Article In: IEEE-RAS International Conference on Humanoid Robots, 2025. @inproceedings{Jamsek2025,
title = {Foot Placement Prediction in Real-Time Using Probabilistic Movement Primitives},
author = {Marko Jamsek and Elmar Rueckert and Jan Babic},
year = {2025},
date = {2025-07-23},
urldate = {2025-07-23},
booktitle = {IEEE-RAS International Conference on Humanoid Robots},
keywords = {human motor control, movement primitives},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2021
|
Tanneberg, Daniel; Ploeger, Kai; Rueckert, Elmar; Peters, Jan SKID RAW: Skill Discovery from Raw Trajectories Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Tanneberg2021,
title = {SKID RAW: Skill Discovery from Raw Trajectories},
author = {Daniel Tanneberg and Kai Ploeger and Elmar Rueckert and Jan Peters },
url = {https://cps.unileoben.ac.at/wp/RAL2021Tanneberg.pdf, Article File},
issn = {2377-3766},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {Manipulation, movement primitives, Probabilistic Inference},
pubstate = {published},
tppubtype = {article}
}
| 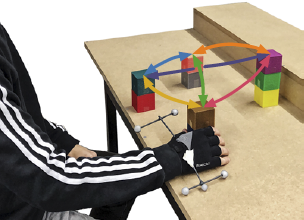 |
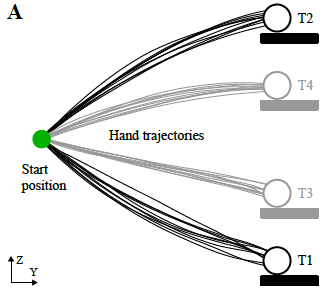
Jamsek, Marko; Kunavar, Tjasa; Bobek, Urban; Rueckert, Elmar; Babic, Jan Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, ISSN: 2377-3766, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Jamsek2021,
title = {Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller},
author = {Marko Jamsek and Tjasa Kunavar and Urban Bobek and Elmar Rueckert and Jan Babic},
url = {../wp/RAL2021Jamsek.pdf, Article File},
doi = {10.1109/LRA.2021.3068892},
issn = {2377-3766},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {human motor control, movement primitives},
pubstate = {published},
tppubtype = {article}
}
|  |
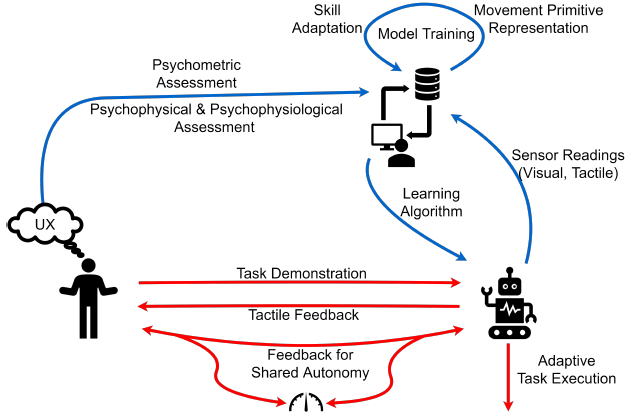
Cansev, Mehmet Ege; Xue, Honghu; Rottmann, Nils; Bliek, Adna; Miller, Luke E.; Rueckert, Elmar; Beckerle, Philipp Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, pp. 1–28, 2021. @article{Cansev2021,
title = {Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience},
author = {Mehmet Ege Cansev and Honghu Xue and Nils Rottmann and Adna Bliek and Luke E. Miller and Elmar Rueckert and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/AIS2021Cansev.pdf, Article File},
doi = {10.1002/aisy.202000247},
year = {2021},
date = {2021-03-10},
journal = {Advanced Intelligent Systems},
pages = {1--28},
keywords = {human motor control, intrinsic motivation, movement primitives, Probabilistic Inference, Reinforcement Learning, spiking},
pubstate = {published},
tppubtype = {article}
}
|  |
2020
|
Akbulut, M Tuluhan; Oztop, Erhan; Seker, M Yunus; Xue, Honghu; Tekden, Ahmet E; Ugur, Emre ACNMP: Skill Transfer and Task Extrapolation through Learning from Demonstration and Reinforcement Learning via Representation Sharing Proceedings Article In: 2020. @inproceedings{nokey,
title = {ACNMP: Skill Transfer and Task Extrapolation through Learning from Demonstration and Reinforcement Learning via Representation Sharing},
author = {M Tuluhan Akbulut and Erhan Oztop and M Yunus Seker and Honghu Xue and Ahmet E Tekden and Emre Ugur},
url = {https://cps.unileoben.ac.at/wp/CoRL2020Akbulut.pdf},
year = {2020},
date = {2020-11-20},
urldate = {2020-11-20},
abstract = {To equip robots with dexterous skills, an effective approach is to first transfer the desired skill via Learning from Demonstration (LfD), then let the robot improve it by self-exploration via Reinforcement Learning (RL). In this paper, we propose a novel LfD+RL framework, namely Adaptive Conditional Neural Movement Primitives (ACNMP), that allows efficient policy improvement in novel environments and effective skill transfer between different agents. This is achieved through exploiting the latent representation learned by the underlying Conditional Neural Process (CNP) model, and simultaneous training of the model with supervised learning (SL) for acquiring the demonstrated trajectories and via RL for new trajectory discovery. Through simulation experiments, we show that (i) ACNMP enables the system to extrapolate to situations where pure LfD fails; (ii) Simultaneous training of the system through SL and RL preserves the shape of demonstrations while adapting to novel situations due to the shared representations used by both learners; (iii) ACNMP enables order-of-magnitude sample-efficient RL in extrapolation of reaching tasks compared to the existing approaches; (iv) ACNMPs can be used to implement skill transfer between robots having different morphology, with competitive learning speeds and importantly with less number of assumptions compared to the state-of-the-art approaches. Finally, we show the real-world suitability of ACNMPs through real robot experiments that involve obstacle avoidance, pick and place and pouring actions.},
keywords = {Deep Learning, movement primitives, Transfer Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
To equip robots with dexterous skills, an effective approach is to first transfer the desired skill via Learning from Demonstration (LfD), then let the robot improve it by self-exploration via Reinforcement Learning (RL). In this paper, we propose a novel LfD+RL framework, namely Adaptive Conditional Neural Movement Primitives (ACNMP), that allows efficient policy improvement in novel environments and effective skill transfer between different agents. This is achieved through exploiting the latent representation learned by the underlying Conditional Neural Process (CNP) model, and simultaneous training of the model with supervised learning (SL) for acquiring the demonstrated trajectories and via RL for new trajectory discovery. Through simulation experiments, we show that (i) ACNMP enables the system to extrapolate to situations where pure LfD fails; (ii) Simultaneous training of the system through SL and RL preserves the shape of demonstrations while adapting to novel situations due to the shared representations used by both learners; (iii) ACNMP enables order-of-magnitude sample-efficient RL in extrapolation of reaching tasks compared to the existing approaches; (iv) ACNMPs can be used to implement skill transfer between robots having different morphology, with competitive learning speeds and importantly with less number of assumptions compared to the state-of-the-art approaches. Finally, we show the real-world suitability of ACNMPs through real robot experiments that involve obstacle avoidance, pick and place and pouring actions. |  |
2019
|
Stark, Svenja; Peters, Jan; Rueckert, Elmar Experience Reuse with Probabilistic Movement Primitives Proceedings Article In: Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019., 2019. @inproceedings{Stark2019,
title = {Experience Reuse with Probabilistic Movement Primitives},
author = {Svenja Stark and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2019Stark.pdf, Article File},
year = {2019},
date = {2019-11-03},
booktitle = {Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019.},
keywords = {movement primitives, Reinforcement Learning, Transfer Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2018
|
Sosic, Adrian; Zoubir, Abdelhak M.; Rueckert, Elmar; Peters, Jan; Koeppl, Heinz Inverse Reinforcement Learning via Nonparametric Spatio-Temporal Subgoal Modeling Journal Article In: Journal of Machine Learning Research (JMLR), vol. 19, no. 69, pp. 1-45, 2018. @article{Sosic2018,
title = {Inverse Reinforcement Learning via Nonparametric Spatio-Temporal Subgoal Modeling},
author = {Adrian Sosic and Abdelhak M. Zoubir and Elmar Rueckert and Jan Peters and
Heinz Koeppl},
url = {https://cps.unileoben.ac.at/wp/JMLR2018Sosic.pdf, Preprint Article File},
year = {2018},
date = {2018-10-08},
journal = {Journal of Machine Learning Research (JMLR)},
volume = {19},
number = {69},
pages = {1-45},
keywords = {movement primitives, Probabilistic Inference, Simulation},
pubstate = {published},
tppubtype = {article}
}
|  |
Paraschos, Alexandros; Rueckert, Elmar; Peters, Jan; Neumann, Gerhard Probabilistic Movement Primitives under Unknown System Dynamics Journal Article In: Advanced Robotics (ARJ), vol. 32, no. 6, pp. 297-310, 2018. @article{Paraschos2018,
title = {Probabilistic Movement Primitives under Unknown System Dynamics},
author = {Alexandros Paraschos and Elmar Rueckert and Jan Peters and Gerhard Neumann },
url = {https://cps.unileoben.ac.at/wp/AR2018Paraschos.pdf, Article File},
doi = {10.1080/01691864.2018.1437674},
year = {2018},
date = {2018-01-10},
journal = {Advanced Robotics (ARJ)},
volume = {32},
number = {6},
pages = {297-310},
keywords = {inverse dynamics, model learning, movement primitives},
pubstate = {published},
tppubtype = {article}
}
|  |
2017
|
Stark, Svenja; Peters, Jan; Rueckert, Elmar A Comparison of Distance Measures for Learning Nonparametric Motor Skill Libraries Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Humanoids2017Stark,
title = {A Comparison of Distance Measures for Learning Nonparametric Motor Skill Libraries},
author = {Svenja Stark and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Stark.pdf, Article File},
year = {2017},
date = {2017-11-15},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p11093},
key = {goal-robots, skills4robots},
keywords = {intrinsic motivation, movement primitives},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2015
|
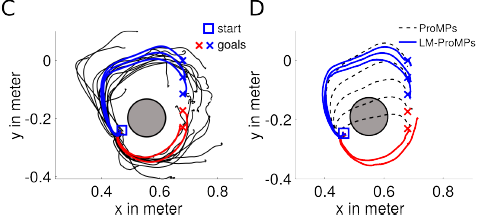
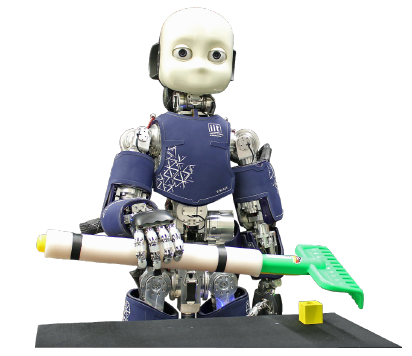
Rueckert, Elmar; Mundo, Jan; Paraschos, Alexandros; Peters, Jan; Neumann, Gerhard Extracting Low-Dimensional Control Variables for Movement Primitives Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2015. @inproceedings{Rueckert2015,
title = {Extracting Low-Dimensional Control Variables for Movement Primitives},
author = {Elmar Rueckert and Jan Mundo and Alexandros Paraschos and Jan Peters and Gerhard Neumann},
url = {https://cps.unileoben.ac.at/wp/ICRA2015Rueckert.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_LatentManifoldPrimitives_2015Rueckert.zip, MATALB Code
https://cps.unileoben.ac.at/wp/resources/videos/KUKA_LatentManifold_ProMPs_REAL_Elmar.mp4, Supplementary Video},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of the International Conference on Robotics and Automation (ICRA)},
crossref = {p10796},
key = {3rdhand, codyco},
keywords = {movement primitives, Probabilistic Inference},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Paraschos, Alexandros; Rueckert, Elmar; Peters, Jan; Neumann, Gerhard Model-Free Probabilistic Movement Primitives for Physical Interaction Proceedings Article In: Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2015. @inproceedings{Paraschos2015,
title = {Model-Free Probabilistic Movement Primitives for Physical Interaction},
author = {Alexandros Paraschos and Elmar Rueckert and Jan Peters and Gerhard Neumann},
url = {https://cps.unileoben.ac.at/wp/IROS2015Paraschos.pdf, Article File},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS)},
crossref = {p10832},
key = {codyco},
keywords = {inverse dynamics, movement primitives},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2014
|
Rueckert, Elmar Biologically inspired motor skill learning in robotics through probabilistic inference PhD Thesis Technical University Graz, 2014. @phdthesis{Rueckert2014a,
title = {Biologically inspired motor skill learning in robotics through probabilistic inference},
author = {Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/PhDThesis2014Rueckert.pdf, Article File},
year = {2014},
date = {2014-02-04},
school = {Technical University Graz},
keywords = {graphical models, locomotion, model learning, morphological compuation, movement primitives, policy search, postural control, Probabilistic Inference, Reinforcement Learning, RNN, SOC, spiking},
pubstate = {published},
tppubtype = {phdthesis}
}
|  |
2013
|
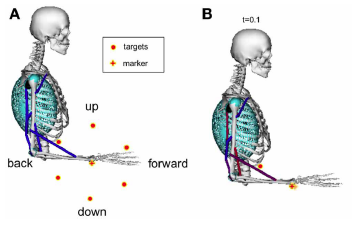
Rueckert, Elmar; d'Avella, Andrea Learned parametrized dynamic movement primitives with shared synergies for controlling robotic and musculoskeletal systems Journal Article In: Frontiers in Computational Neuroscience, vol. 7, no. 138, 2013. @article{Rueckert2013b,
title = {Learned parametrized dynamic movement primitives with shared synergies for controlling robotic and musculoskeletal systems},
author = {Elmar Rueckert and Andrea d'Avella},
url = {https://cps.unileoben.ac.at/wp/Frontiers2013bRueckert.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_PlanarWalkerSimulator_2013Rueckert.zip, MATLAB Code (Planar Walker Simulator)
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_OpenSimMEXInterface_2013Rueckert.zip, MATLAB Code (OpenSim MEX-Function Interface)},
doi = {10.3389/fncom.2013.00138},
year = {2013},
date = {2013-10-17},
journal = {Frontiers in Computational Neuroscience},
volume = {7},
number = {138},
keywords = {locomotion, movement primitives, muscle synergies},
pubstate = {published},
tppubtype = {article}
}
|  |
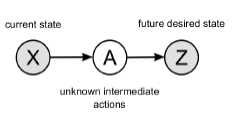
Rueckert, Elmar; Neumann, Gerhard; Toussaint, Marc; Maass, Wolfgang Learned graphical models for probabilistic planning provide a new class of movement primitives Journal Article In: Frontiers in Computational Neuroscience, vol. 6, no. 97, 2013. @article{Rueckert2013,
title = { Learned graphical models for probabilistic planning provide a new class of movement primitives},
author = {Elmar Rueckert and Gerhard Neumann and Marc Toussaint and Wolfgang Maass},
url = {https://cps.unileoben.ac.at/wp/Frontiers2013aRueckert.pdf, Article File},
doi = {10.3389/fncom.2012.00097},
year = {2013},
date = {2013-01-02},
journal = {Frontiers in Computational Neuroscience},
volume = {6},
number = {97},
keywords = {graphical models, movement primitives, Probabilistic Inference},
pubstate = {published},
tppubtype = {article}
}
|  |