2025
|
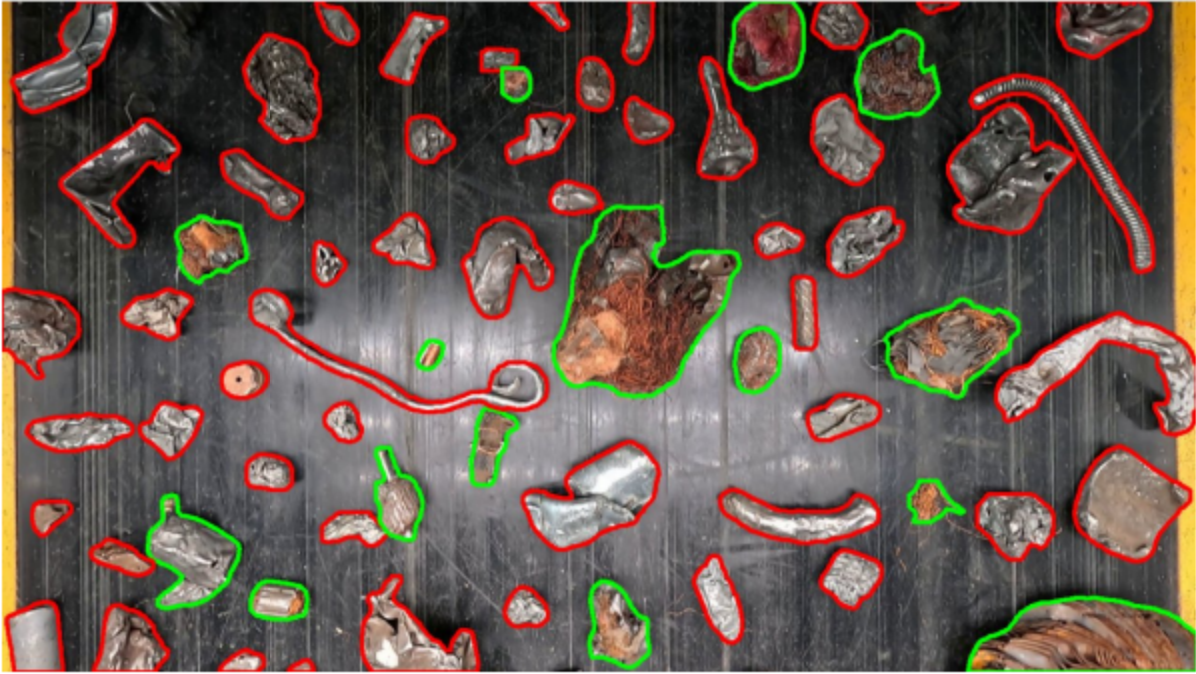
Neubauer, Melanie; Özdenizci, Ozan; Piater, Justus; Rueckert, Elmar Sparsifying instance segmentation models for efficient vision-based industrial recycling Proceedings Article In: European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases, 2025. @inproceedings{neubauer2025ibis,
title = {Sparsifying instance segmentation models for efficient vision-based industrial recycling},
author = {Melanie Neubauer and Ozan Özdenizci and Justus Piater and Elmar Rueckert },
url = {https://cloud.cps.unileoben.ac.at/index.php/s/RzZNxYmJbTN8fCb},
year = {2025},
date = {2025-05-15},
urldate = {2025-05-15},
booktitle = {European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
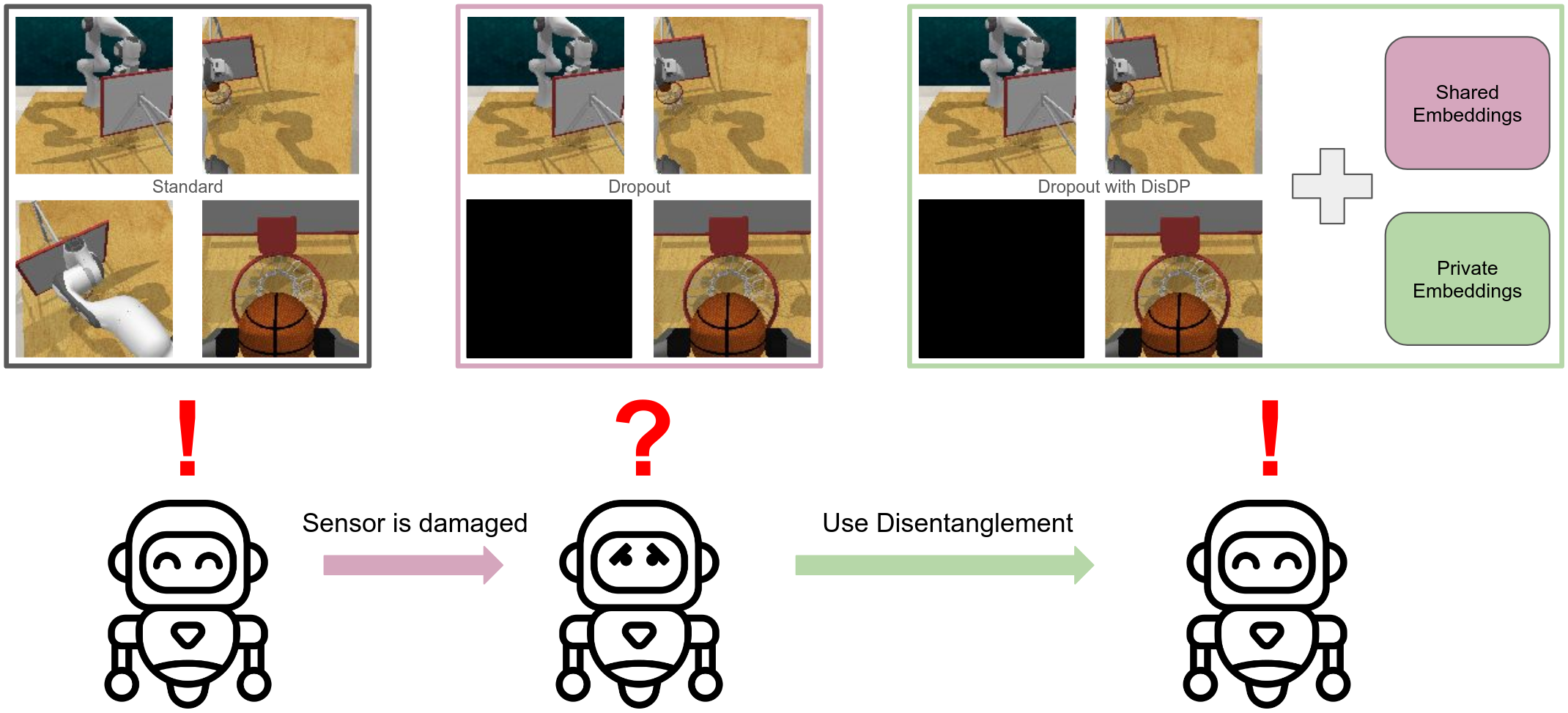
Vanjani, Pankhuri; Mattes, Paul; Li, Maximilian Xiling; Dave, Vedant; Lioutikov, Rudolf DisDP: Robust Imitation Learning via Disentangled Diffusion Policies Proceedings Article Forthcoming In: Reinforcement Learning Conference (RLC), Reinforcement Learning Journal, Forthcoming. @inproceedings{dave2025disdp,
title = {DisDP: Robust Imitation Learning via Disentangled Diffusion Policies},
author = {Pankhuri Vanjani and Paul Mattes and Maximilian Xiling Li and Vedant Dave and Rudolf Lioutikov},
year = {2025},
date = {2025-05-09},
urldate = {2025-05-09},
booktitle = {Reinforcement Learning Conference (RLC)},
publisher = {Reinforcement Learning Journal},
keywords = {Contrastive Learning, Imitation Learning, Representation Learning},
pubstate = {forthcoming},
tppubtype = {inproceedings}
}
|  |
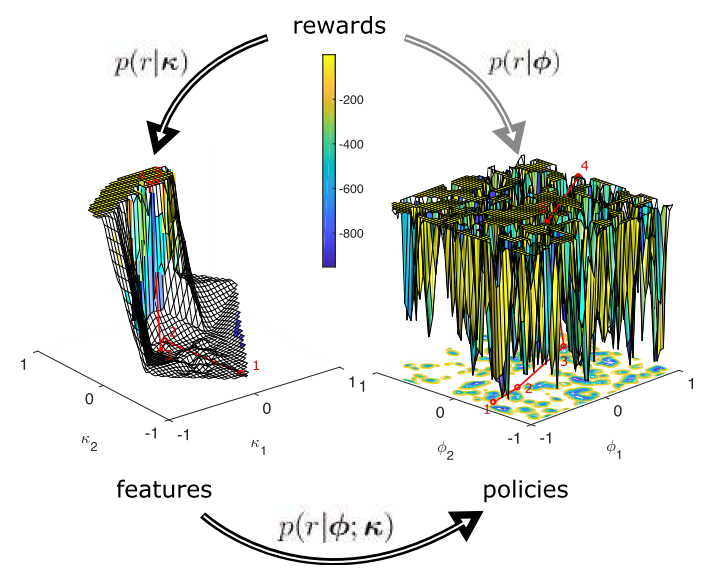
Dave, Vedant; Rueckert, Elmar Skill Disentanglement in Reproducing Kernel Hilbert Space Proceedings Article In: Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), pp. 16153-16162, 2025. @inproceedings{Dave2025bb,
title = {Skill Disentanglement in Reproducing Kernel Hilbert Space},
author = {Vedant Dave and Elmar Rueckert
},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/m9XKo4t2FXAH6Cs},
doi = {https://doi.org/10.1609/aaai.v39i15.33774},
year = {2025},
date = {2025-04-11},
urldate = {2025-02-27},
booktitle = {Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)},
volume = {39},
number = {15},
pages = {16153-16162},
abstract = {Unsupervised Skill Discovery aims at learning diverse skills without any extrinsic rewards and leverage them as prior for learning a variety of downstream tasks. Existing approaches to unsupervised reinforcement learning typically involve discovering skills through empowerment-driven techniques or by maximizing entropy to encourage exploration. However, this mutual information objective often results in either static skills that discourage exploration or maximise coverage at the expense of non-discriminable skills. Instead of focusing only on maximizing bounds on f-divergence, we combine it with Integral Probability Metrics to maximize the distance between distributions to promote behavioural diversity and enforce disentanglement. Our method, Hilbert Unsupervised Skill Discovery (HUSD), provides an additional objective that seeks to obtain exploration and separability of state-skill pairs by maximizing the Maximum Mean Discrepancy between the joint distribution of skills and states and the product of their marginals in Reproducing Kernel Hilbert Space. Our results on Unsupervised RL Benchmark show that HUSD outperforms previous exploration algorithms on state-based tasks.},
keywords = {Deep Learning, neural network, Reinforcement Learning, Skill Discovery, Unsupervised Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
Unsupervised Skill Discovery aims at learning diverse skills without any extrinsic rewards and leverage them as prior for learning a variety of downstream tasks. Existing approaches to unsupervised reinforcement learning typically involve discovering skills through empowerment-driven techniques or by maximizing entropy to encourage exploration. However, this mutual information objective often results in either static skills that discourage exploration or maximise coverage at the expense of non-discriminable skills. Instead of focusing only on maximizing bounds on f-divergence, we combine it with Integral Probability Metrics to maximize the distance between distributions to promote behavioural diversity and enforce disentanglement. Our method, Hilbert Unsupervised Skill Discovery (HUSD), provides an additional objective that seeks to obtain exploration and separability of state-skill pairs by maximizing the Maximum Mean Discrepancy between the joint distribution of skills and states and the product of their marginals in Reproducing Kernel Hilbert Space. Our results on Unsupervised RL Benchmark show that HUSD outperforms previous exploration algorithms on state-based tasks. |  |
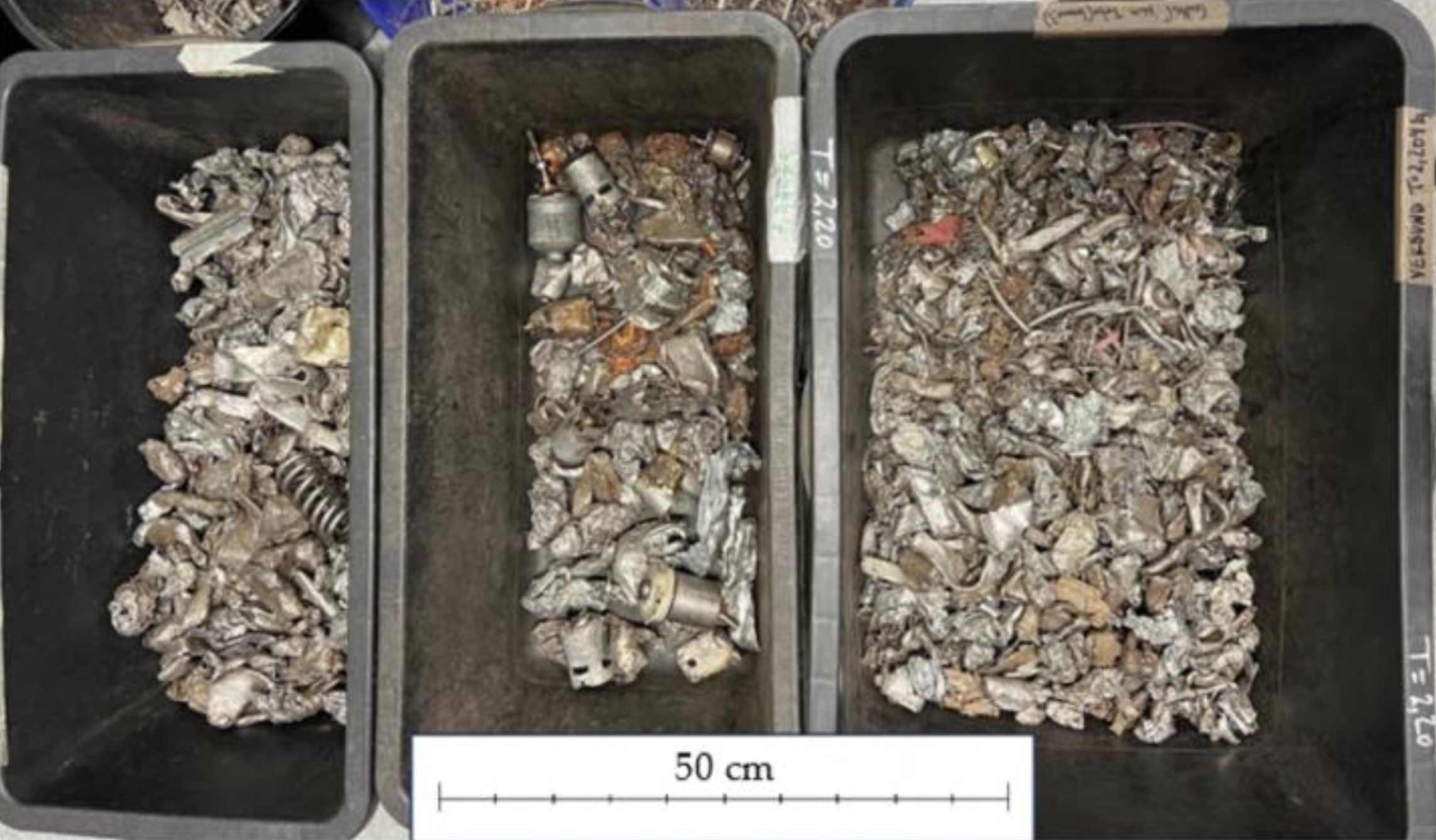
Koinig, Gerald; Neubauer, Melanie; Martinelli, Walter; Radmann, Yves; Kuhn, Nikolai; Fink, Thomas; Rueckert, Elmar; Tischberger-Aldrian, Alexia CNN-based copper reduction in shredded scrap for enhanced electric arc furnace steelmaking Proceedings Article In: International Conference on Optical Characterization of Materials (OCM 2025), pp. 319-328, 2025, ISBN: 9783731514084. @inproceedings{nokey,
title = {CNN-based copper reduction in shredded scrap for enhanced electric arc furnace steelmaking},
author = {Gerald Koinig and Melanie Neubauer and Walter Martinelli and Yves Radmann and Nikolai Kuhn and Thomas Fink and Elmar Rueckert and Alexia Tischberger-Aldrian},
url = {http://www.scopus.com/inward/record.url?scp=105005090678&partnerID=8YFLogxK
https://books.google.de/books?hl=de&lr=&id=cQtZEQAAQBAJ&oi=fnd&pg=PA329&dq=CNN-based+copper+reduction+in+shredded+scrap+for+enhanced+electric+arc+furnace+steelmaking&ots=UK8_ZX8DWo&sig=9itL3MMW7ZDb1HK5rucwcYwVzG0
},
isbn = {9783731514084},
year = {2025},
date = {2025-03-26},
urldate = {2025-03-26},
booktitle = {International Conference on Optical Characterization of Materials (OCM 2025)},
pages = {319-328},
keywords = {Applied Deep Learning, neural network, Recycling},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
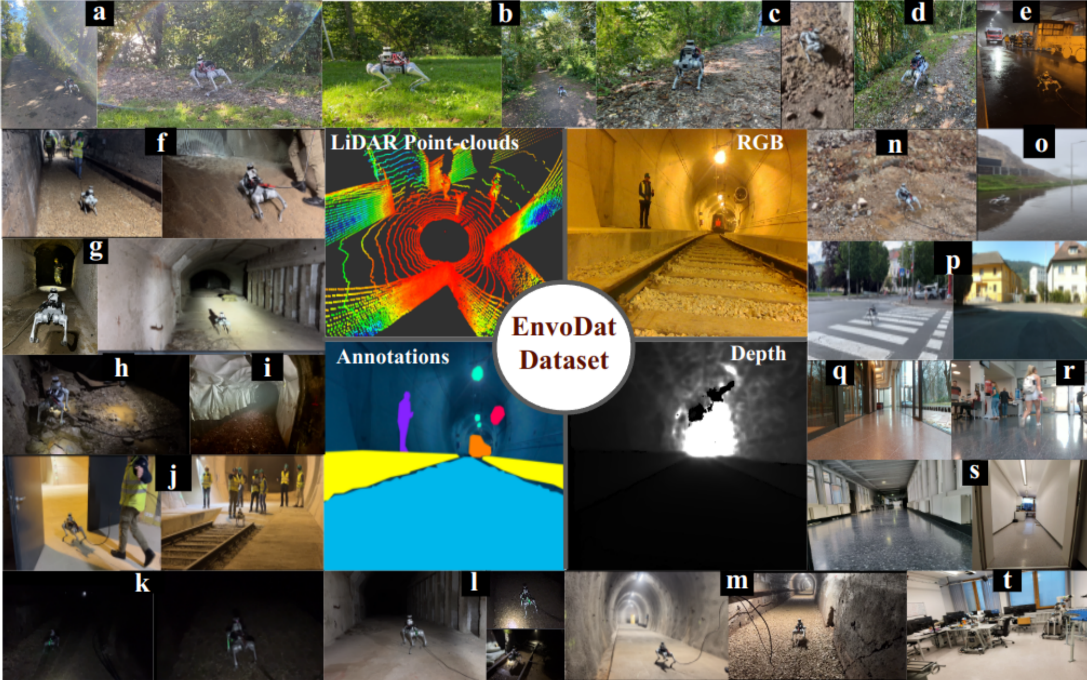
Nwankwo, Linus; Ellensohn, Bjoern; Dave, Vedant; Hofer, Peter; Forstner, Jan; Villneuve, Marlene; Galler, Robert; Rueckert, Elmar EnvoDat: A Large-Scale Multisensory Dataset for Robotic Spatial Awareness and Semantic Reasoning in Heterogeneous Environments Proceedings Article In: IEEE International Conference on Robotics and Automation (ICRA 2025)., 2025. @inproceedings{Nwankwo2025,
title = {EnvoDat: A Large-Scale Multisensory Dataset for Robotic Spatial Awareness and Semantic Reasoning in Heterogeneous Environments},
author = {Linus Nwankwo and Bjoern Ellensohn and Vedant Dave and Peter Hofer and Jan Forstner and Marlene Villneuve and Robert Galler and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/MawgtYSbTBoNBZo},
year = {2025},
date = {2025-01-27},
urldate = {2025-01-27},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2025).},
keywords = {Autonomous Navigation, robotics, SLAM},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
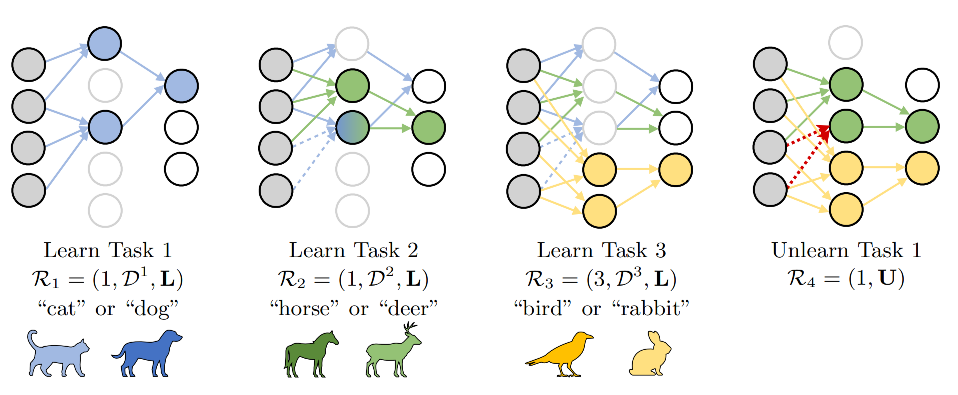
Oezdenizci, Ozan; Rueckert, Elmar; Legenstein, Robert Privacy-Aware Lifelong Learning Proceedings Article In: International Conference on Learning Representations (ICLR), 2025. @inproceedings{Oezdenizci2025,
title = {Privacy-Aware Lifelong Learning},
author = {Ozan Oezdenizci and Elmar Rueckert and Robert Legenstein},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/4GLWiwFrYfZyFyS},
year = {2025},
date = {2025-01-22},
urldate = {2025-01-22},
booktitle = {International Conference on Learning Representations (ICLR)},
keywords = {Deep Learning, machine learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2024
|
Lygerakis, Fotios; Dave, Vedant; Rueckert, Elmar M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{Lygerakis2024,
title = {M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation},
author = {Fotios Lygerakis and Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/NPejb2Fp4Y8LeyZ},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {Contrastive Learning, Manipulation, Multimodal Reinforcement Learning, Multimodal Representation Learning, Reinforcement Learning, Robot Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
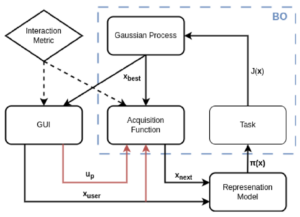
Feith, Nikolaus; Rueckert, Elmar Integrating Human Expertise in Continuous Spaces: A Novel Interactive Bayesian Optimization Framework with Preference Expected Improvement Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{Feith2024A,
title = {Integrating Human Expertise in Continuous Spaces: A Novel Interactive Bayesian Optimization Framework with Preference Expected Improvement},
author = {Nikolaus Feith and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/6rTWAkoXa3zsJxf},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {Interactive Learning, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
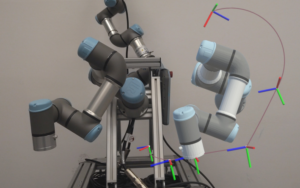
Feith, Nikolaus; Rueckert, Elmar Advancing Interactive Robot Learning: A User Interface Leveraging Mixed Reality and Dual Quaternions Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{Feith2024B,
title = {Advancing Interactive Robot Learning: A User Interface Leveraging Mixed Reality and Dual Quaternions},
author = {Nikolaus Feith and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/qCgzbmCJYSH3F97},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {Human-Robot Interaction, Mixted Reality, Robot Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
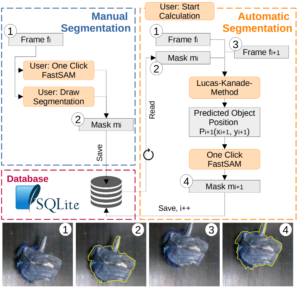
Neubauer, Melanie; Rueckert, Elmar Semi-Autonomous Fast Object Segmentation and Tracking Tool for Industrial Applications Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{neubauer2024fost,
title = {Semi-Autonomous Fast Object Segmentation and Tracking Tool for Industrial Applications},
author = {Melanie Neubauer and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/6fTmgDZRQfDHfmg},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {computer vision, Deep Learning, Recycling},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
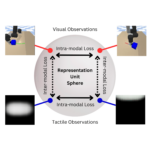
Dave*, Vedant; Lygerakis*, Fotios; Rueckert, Elmar Multimodal Visual-Tactile Representation Learning through Self-Supervised Contrastive Pre-Training Proceedings Article In: IEEE International Conference on Robotics and Automation (ICRA), pp. 8013-8020, IEEE, 2024, ISBN: 979-8-3503-8457-4, (* equal contribution). @inproceedings{Dave2024b,
title = {Multimodal Visual-Tactile Representation Learning through Self-Supervised Contrastive Pre-Training},
author = {Vedant Dave* and Fotios Lygerakis* and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/Nw9TprfdDoLgr8e},
doi = {10.1109/ICRA57147.2024.10610228},
isbn = {979-8-3503-8457-4},
year = {2024},
date = {2024-01-28},
urldate = {2024-01-28},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
pages = {8013-8020},
publisher = {IEEE},
abstract = {The rapidly evolving field of robotics necessitates methods that can facilitate the fusion of multiple modalities. Specifically, when it comes to interacting with tangible objects, effectively combining visual and tactile sensory data is key to understanding and navigating the complex dynamics of the physical world, enabling a more nuanced and adaptable response to changing environments. Nevertheless, much of the earlier work in merging these two sensory modalities has relied on supervised methods utilizing datasets labeled by humans. This paper introduces MViTac, a novel methodology that leverages contrastive learning to integrate vision and touch sensations in a self-supervised fashion. By availing both sensory inputs, MViTac leverages intra and inter-modality losses for learning representations, resulting in enhanced material property classification and more adept grasping prediction. Through a series of experiments, we showcase the effectiveness of our method and its superiority over existing state-of-the-art self-supervised and supervised techniques. In evaluating our methodology, we focus on two distinct tasks: material classification and grasping success prediction. Our results indicate that MViTac facilitates the development of improved modality encoders, yielding more robust representations as evidenced by linear probing assessments. https://sites.google.com/view/mvitac/home},
note = {* equal contribution},
keywords = {Contrastive Learning, Representation Learning, Self-supervised Learning, Tactile Sensing},
pubstate = {published},
tppubtype = {inproceedings}
}
The rapidly evolving field of robotics necessitates methods that can facilitate the fusion of multiple modalities. Specifically, when it comes to interacting with tangible objects, effectively combining visual and tactile sensory data is key to understanding and navigating the complex dynamics of the physical world, enabling a more nuanced and adaptable response to changing environments. Nevertheless, much of the earlier work in merging these two sensory modalities has relied on supervised methods utilizing datasets labeled by humans. This paper introduces MViTac, a novel methodology that leverages contrastive learning to integrate vision and touch sensations in a self-supervised fashion. By availing both sensory inputs, MViTac leverages intra and inter-modality losses for learning representations, resulting in enhanced material property classification and more adept grasping prediction. Through a series of experiments, we showcase the effectiveness of our method and its superiority over existing state-of-the-art self-supervised and supervised techniques. In evaluating our methodology, we focus on two distinct tasks: material classification and grasping success prediction. Our results indicate that MViTac facilitates the development of improved modality encoders, yielding more robust representations as evidenced by linear probing assessments. https://sites.google.com/view/mvitac/home | 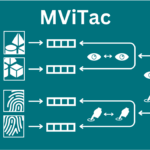 |
Nwankwo, Linus; Rueckert, Elmar The Conversation is the Command: Interacting with Real-World Autonomous Robots Through Natural Language Proceedings Article In: HRI '24: Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction., pp. 808–812, ACM/IEEE Association for Computing Machinery, New York, NY, USA, 2024, ISBN: 9798400703232, (Published as late breaking results. Supplementary video: https://cloud.cps.unileoben.ac.at/index.php/s/fRE9XMosWDtJ339 ). @inproceedings{Nwankwo2024,
title = {The Conversation is the Command: Interacting with Real-World Autonomous Robots Through Natural Language},
author = {Linus Nwankwo and Elmar Rueckert},
url = {https://doi.org/10.1145/3610978.3640723
https://cloud.cps.unileoben.ac.at/index.php/s/YzJdHWDt9ZdqsZs},
doi = {10.1145/3610978.3640723},
isbn = {9798400703232},
year = {2024},
date = {2024-01-16},
urldate = {2024-01-16},
booktitle = {HRI '24: Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction.},
pages = {808–812},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
organization = {ACM/IEEE},
series = {HRI '24},
abstract = {In recent years, autonomous agents have surged in real-world environments such as our homes, offices, and public spaces. However, natural human-robot interaction remains a key challenge. In this paper, we introduce an approach that synergistically exploits the capabilities of large language models (LLMs) and multimodal vision-language models (VLMs) to enable humans to interact naturally with autonomous robots through conversational dialogue. We leveraged the LLMs to decode the high-level natural language instructions from humans and abstract them into precise robot actionable commands or queries. Further, we utilised the VLMs to provide a visual and semantic understanding of the robot's task environment. Our results with 99.13% command recognition accuracy and 97.96% commands execution success show that our approach can enhance human-robot interaction in real-world applications. The video demonstrations of this paper can be found at https://osf.io/wzyf6 and the code is available at our GitHub repository.},
howpublished = {ACM/IEEE International Conference on Human-Robot Interaction (HRI ’24 Companion)},
key = {ChatGPT, LLMs, ROS, VLMs, autonomous robots, human-robot interaction, natural language interaction},
note = {Published as late breaking results. Supplementary video: https://cloud.cps.unileoben.ac.at/index.php/s/fRE9XMosWDtJ339 },
keywords = {Autonomous Navigation, Large Language Models},
pubstate = {published},
tppubtype = {inproceedings}
}
In recent years, autonomous agents have surged in real-world environments such as our homes, offices, and public spaces. However, natural human-robot interaction remains a key challenge. In this paper, we introduce an approach that synergistically exploits the capabilities of large language models (LLMs) and multimodal vision-language models (VLMs) to enable humans to interact naturally with autonomous robots through conversational dialogue. We leveraged the LLMs to decode the high-level natural language instructions from humans and abstract them into precise robot actionable commands or queries. Further, we utilised the VLMs to provide a visual and semantic understanding of the robot's task environment. Our results with 99.13% command recognition accuracy and 97.96% commands execution success show that our approach can enhance human-robot interaction in real-world applications. The video demonstrations of this paper can be found at https://osf.io/wzyf6 and the code is available at our GitHub repository. | 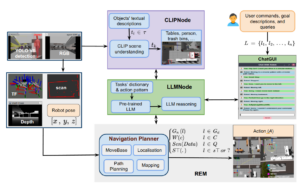 |
2023
|
Lygerakis, Fotios; Rueckert, Elmar CR-VAE: Contrastive Regularization on Variational Autoencoders for Preventing Posterior Collapse Proceedings Article In: Asian Conference of Artificial Intelligence Technology (ACAIT)., IEEE, 2023. @inproceedings{Lygerakis2023,
title = {CR-VAE: Contrastive Regularization on Variational Autoencoders for Preventing Posterior Collapse},
author = {Fotios Lygerakis and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/fNNRnzJFPrtGQM2},
year = {2023},
date = {2023-08-16},
urldate = {2023-08-16},
booktitle = {Asian Conference of Artificial Intelligence Technology (ACAIT).},
publisher = {IEEE},
keywords = {Representation Learning, Self-supervised Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Yadav, Harsh; Xue, Honghu; Rudall, Yan; Bakr, Mohamed; Hein, Benedikt; Rueckert, Elmar; Nguyen, Ngoc Thinh Deep Reinforcement Learning for Mapless Navigation of Autonomous Mobile Robot Proceedings Article In: International Conference on System Theory, Control and Computing (ICSTCC), 2023, (October 11-13, 2023, Timisoara, Romania.). @inproceedings{Yadav2023b,
title = {Deep Reinforcement Learning for Mapless Navigation of Autonomous Mobile Robot},
author = {Harsh Yadav and Honghu Xue and Yan Rudall and Mohamed Bakr and Benedikt Hein and Elmar Rueckert and Ngoc Thinh Nguyen},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/zEnY3yoFHZRdzkR},
year = {2023},
date = {2023-06-26},
urldate = {2023-06-26},
publisher = { International Conference on System Theory, Control and Computing (ICSTCC)},
note = {October 11-13, 2023, Timisoara, Romania.},
keywords = {Autonomous Navigation, Deep Learning, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
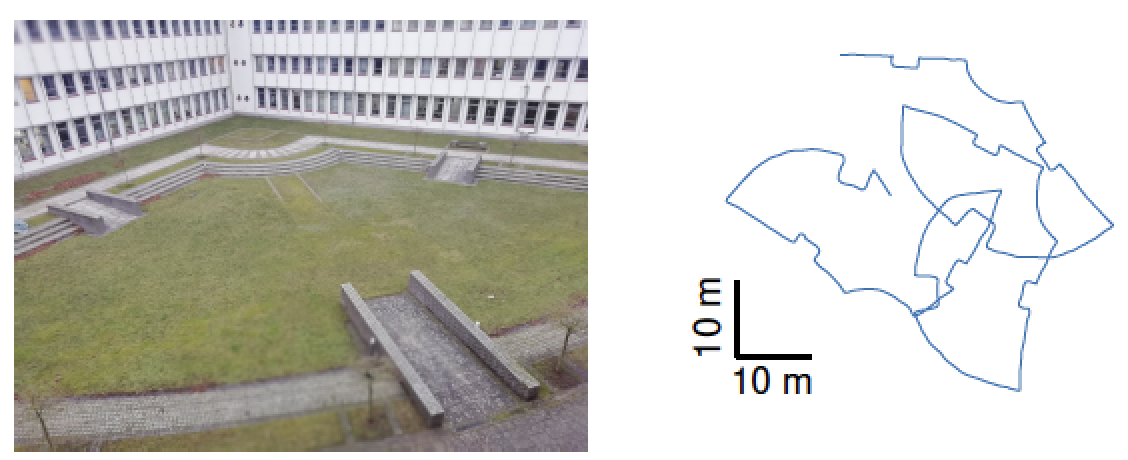
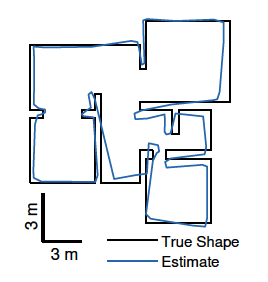
Nwankwo, Linus; Rueckert, Elmar Understanding why SLAM algorithms fail in modern indoor environments Proceedings Article In: International Conference on Robotics in Alpe-Adria-Danube Region (RAAD). , pp. 186 – 194, Cham: Springer Nature Switzerland., 2023. @inproceedings{Nwankwo2023,
title = {Understanding why SLAM algorithms fail in modern indoor environments},
author = {Linus Nwankwo and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/KdZ2E2np5QEnYfL
},
doi = {https://doi.org/10.1007/978-3-031-32606-6_22},
year = {2023},
date = {2023-05-27},
urldate = {2023-05-27},
booktitle = {International Conference on Robotics in Alpe-Adria-Danube Region (RAAD). },
volume = {135},
pages = {186 - 194},
publisher = {Cham: Springer Nature Switzerland.},
series = {Mechanisms and Machine Science},
abstract = {Simultaneous localization and mapping (SLAM) algorithms are essential for the autonomous navigation of mobile robots. With the increasing demand for autonomous systems, it is crucial to evaluate and compare the performance of these algorithms in real-world environments.
In this paper, we provide an evaluation strategy and real-world datasets to test and evaluate SLAM algorithms in complex and challenging indoor environments. Further, we analysed state-of-the-art (SOTA) SLAM algorithms based on various metrics such as absolute trajectory error, scale drift, and map accuracy and consistency. Our results demonstrate that SOTA SLAM algorithms often fail in challenging environments, with dynamic objects, transparent and reflecting surfaces. We also found that successful loop closures had a significant impact on the algorithm’s performance. These findings highlight the need for further research to improve the robustness of the algorithms in real-world scenarios. },
keywords = {mobile navigation, robotics, SLAM},
pubstate = {published},
tppubtype = {inproceedings}
}
Simultaneous localization and mapping (SLAM) algorithms are essential for the autonomous navigation of mobile robots. With the increasing demand for autonomous systems, it is crucial to evaluate and compare the performance of these algorithms in real-world environments.
In this paper, we provide an evaluation strategy and real-world datasets to test and evaluate SLAM algorithms in complex and challenging indoor environments. Further, we analysed state-of-the-art (SOTA) SLAM algorithms based on various metrics such as absolute trajectory error, scale drift, and map accuracy and consistency. Our results demonstrate that SOTA SLAM algorithms often fail in challenging environments, with dynamic objects, transparent and reflecting surfaces. We also found that successful loop closures had a significant impact on the algorithm’s performance. These findings highlight the need for further research to improve the robustness of the algorithms in real-world scenarios. | 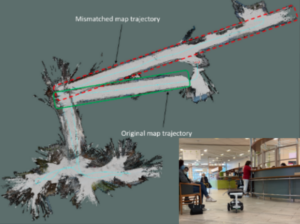 |
Keshavarz, Sahar; Vita, Petr; Rueckert, Elmar; Ortner, Ronald; Thonhauser, Gerhard A Reinforcement Learning Approach for Real-Time Autonomous Decision-Making in Well Construction Proceedings Article In: Society of Petroleum Engineers – SPE Symposium: Leveraging Artificial Intelligence to Shape the Future of the Energy Industry, AIS 2023, Society of Petroleum Engineers., 2023, ISBN: 9781613999882. @inproceedings{Keshavarz2023,
title = {A Reinforcement Learning Approach for Real-Time Autonomous Decision-Making in Well Construction},
author = {Sahar Keshavarz and Petr Vita and Elmar Rueckert and Ronald Ortner and Gerhard Thonhauser},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/yT9Erwsnk36JKtr},
doi = {10.2118/214465-MS},
isbn = {9781613999882},
year = {2023},
date = {2023-01-19},
urldate = {2023-01-19},
booktitle = {Society of Petroleum Engineers - SPE Symposium: Leveraging Artificial Intelligence to Shape the Future of the Energy Industry, AIS 2023},
publisher = {Society of Petroleum Engineers.},
keywords = {Reinforcement Learning, Well Construction},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2022
|
Xue, Honghu; Song, Rui; Petzold, Julian; Hein, Benedikt; Hamann, Heiko; Rueckert, Elmar End-To-End Deep Reinforcement Learning for First-Person Pedestrian Visual Navigation in Urban Environments Proceedings Article In: International Conference on Humanoid Robots (Humanoids 2022), 2022. @inproceedings{Xue2022b,
title = {End-To-End Deep Reinforcement Learning for First-Person Pedestrian Visual Navigation in Urban Environments},
author = {Honghu Xue and Rui Song and Julian Petzold and Benedikt Hein and Heiko Hamann and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/RzMQWqsFarQ6Kw4},
year = {2022},
date = {2022-09-26},
urldate = {2022-09-26},
publisher = {International Conference on Humanoid Robots (Humanoids 2022)},
abstract = {We solve a visual navigation problem in an urban setting via deep reinforcement learning in an end-to-end manner. A major challenge of a first-person visual navigation problem lies in severe partial observability and sparse positive experiences of reaching the goal. To address partial observability, we propose a novel 3D-temporal convolutional network to encode sequential historical visual observations, its effectiveness is verified by comparing to a commonly-used frame-stacking
approach. For sparse positive samples, we propose an improved automatic curriculum learning algorithm NavACL+, which
proposes meaningful curricula starting from easy tasks and gradually generalizes to challenging ones. NavACL+ is shown to
facilitate the learning process, greatly improve the task success rate on difficult tasks by at least 40% and offer enhanced
generalization to different initial poses compared to training from a fixed initial pose and the original NavACL algorithm.},
keywords = {Autonomous Navigation, Deep Learning, mobile navigation},
pubstate = {published},
tppubtype = {inproceedings}
}
We solve a visual navigation problem in an urban setting via deep reinforcement learning in an end-to-end manner. A major challenge of a first-person visual navigation problem lies in severe partial observability and sparse positive experiences of reaching the goal. To address partial observability, we propose a novel 3D-temporal convolutional network to encode sequential historical visual observations, its effectiveness is verified by comparing to a commonly-used frame-stacking
approach. For sparse positive samples, we propose an improved automatic curriculum learning algorithm NavACL+, which
proposes meaningful curricula starting from easy tasks and gradually generalizes to challenging ones. NavACL+ is shown to
facilitate the learning process, greatly improve the task success rate on difficult tasks by at least 40% and offer enhanced
generalization to different initial poses compared to training from a fixed initial pose and the original NavACL algorithm. |  |
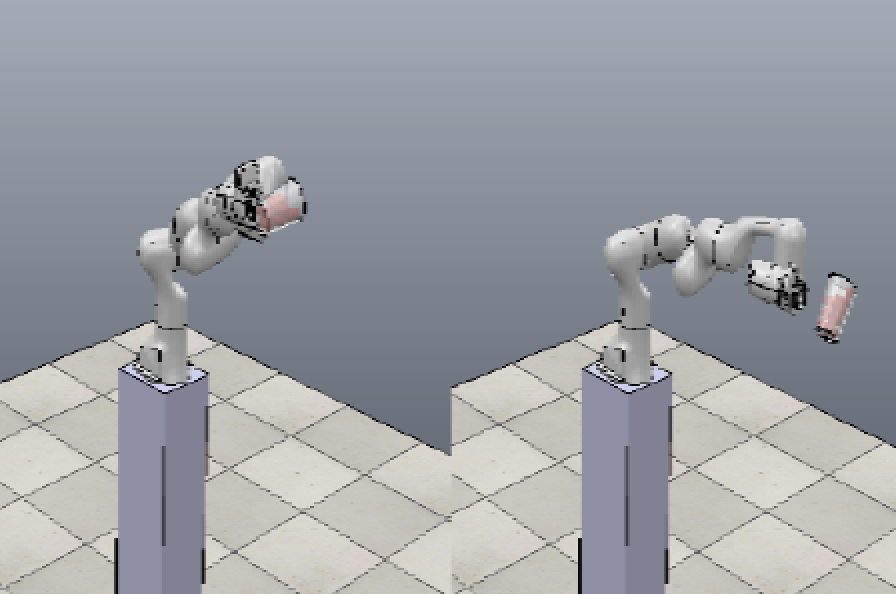
Dave, Vedant; Rueckert, Elmar Predicting full-arm grasping motions from anticipated tactile responses Proceedings Article In: International Conference on Humanoid Robots (Humanoids), pp. 464-471, IEEE, 2022, ISBN: 979-8-3503-0979-9. @inproceedings{Dave2022,
title = {Predicting full-arm grasping motions from anticipated tactile responses},
author = {Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/WzGSNtc5WRLN3EL},
doi = {10.1109/Humanoids53995.2022.9999743},
isbn = {979-8-3503-0979-9},
year = {2022},
date = {2022-09-26},
urldate = {2022-09-26},
booktitle = {International Conference on Humanoid Robots (Humanoids)},
pages = {464-471},
publisher = {IEEE},
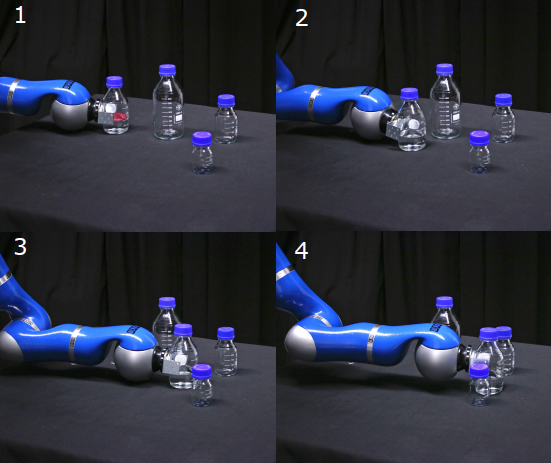
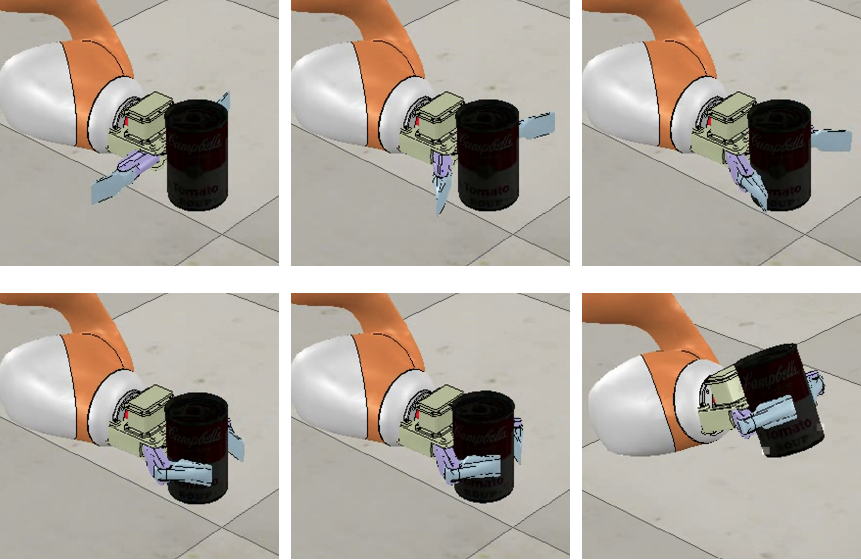
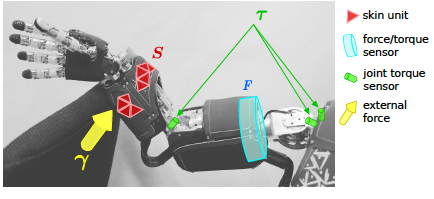
abstract = {Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Depending on the physical properties of the object, manipulation tasks can exhibit large variation in their movements. For a grasping task, the movement of the arm and of the end effector varies depending on different points of contact on the object, especially if the object is non-homogeneous in hardness and/or has an uneven geometry. In this paper, we propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement. We solely condition on the tactile responses to infer the complex manipulation skills. We formulate a joint trajectory of full-arm joints with tactile data, leverage the model to condition on the desired tactile response from the non-homogeneous object and infer the full-arm (7-dof panda arm and 19-dof gripper hand) motion. We use a Gaussian Mixture Model of primitives to address the multimodality in demonstrations. We also show that the measurement noise adjustment must be taken into account due to multiple systems working in collaboration.
We validate and show the robustness of the approach through two experiments. First, we consider an object with non-uniform hardness. Grasping from different locations require different motion, and results into different tactile responses. Second, we have an object with homogeneous hardness, but we grasp it with widely varying grasping configurations. Our result shows that TacProMPs can successfully model complex multimodal skills and generalise to new situations.},
keywords = {Grasping, Manipulation, Probabilistic Movement Primitives, Tactile Sensing},
pubstate = {published},
tppubtype = {inproceedings}
}
Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Depending on the physical properties of the object, manipulation tasks can exhibit large variation in their movements. For a grasping task, the movement of the arm and of the end effector varies depending on different points of contact on the object, especially if the object is non-homogeneous in hardness and/or has an uneven geometry. In this paper, we propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement. We solely condition on the tactile responses to infer the complex manipulation skills. We formulate a joint trajectory of full-arm joints with tactile data, leverage the model to condition on the desired tactile response from the non-homogeneous object and infer the full-arm (7-dof panda arm and 19-dof gripper hand) motion. We use a Gaussian Mixture Model of primitives to address the multimodality in demonstrations. We also show that the measurement noise adjustment must be taken into account due to multiple systems working in collaboration.
We validate and show the robustness of the approach through two experiments. First, we consider an object with non-uniform hardness. Grasping from different locations require different motion, and results into different tactile responses. Second, we have an object with homogeneous hardness, but we grasp it with widely varying grasping configurations. Our result shows that TacProMPs can successfully model complex multimodal skills and generalise to new situations. |  |
Leonel, Rozo*; Vedant, Dave* Orientation Probabilistic Movement Primitives on Riemannian Manifolds Proceedings Article In: Conference on Robot Learning (CoRL), pp. 11, 2022, (* equal contribution). @inproceedings{Leonel2022,
title = {Orientation Probabilistic Movement Primitives on Riemannian Manifolds},
author = {Leonel, Rozo* and Vedant, Dave*},
url = {https://cps.unileoben.ac.at/wp/orientation_probabilistic_move.pdf, Article File},
year = {2022},
date = {2022-01-11},
urldate = {2022-01-11},
booktitle = {Conference on Robot Learning (CoRL)},
volume = {164},
pages = {11},
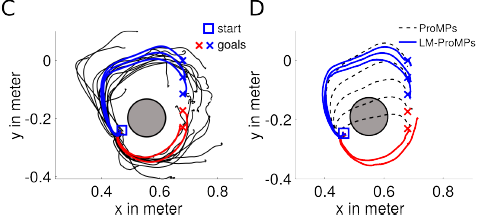
abstract = {Learning complex robot motions necessarily demands to have models that are able to encode and retrieve full-pose trajectories when tasks are defined in operational spaces. Probabilistic movement primitives (ProMPs) stand out as a principled approach that models trajectory distributions learned from demonstrations. ProMPs allow for trajectory modulation and blending to achieve better generalization to novel situations. However, when ProMPs are employed in operational space, their original formulation does not directly apply to full-pose movements including rotational trajectories described by quaternions. This paper proposes a Riemannian formulation of ProMPs that enables encoding and retrieving of quaternion trajectories. Our method builds on Riemannian manifold theory,
and exploits multilinear geodesic regression for estimating the ProMPs parameters. This novel approach makes ProMPs a suitable model for learning complex full-pose robot motion patterns. Riemannian ProMPs are tested on toy examples to illustrate their workflow, and on real learning-from-demonstration experiments.},
note = {* equal contribution},
keywords = {Manipulation, Probabilistic Movement Primitives, Riemannian Manifolds},
pubstate = {published},
tppubtype = {inproceedings}
}
Learning complex robot motions necessarily demands to have models that are able to encode and retrieve full-pose trajectories when tasks are defined in operational spaces. Probabilistic movement primitives (ProMPs) stand out as a principled approach that models trajectory distributions learned from demonstrations. ProMPs allow for trajectory modulation and blending to achieve better generalization to novel situations. However, when ProMPs are employed in operational space, their original formulation does not directly apply to full-pose movements including rotational trajectories described by quaternions. This paper proposes a Riemannian formulation of ProMPs that enables encoding and retrieving of quaternion trajectories. Our method builds on Riemannian manifold theory,
and exploits multilinear geodesic regression for estimating the ProMPs parameters. This novel approach makes ProMPs a suitable model for learning complex full-pose robot motion patterns. Riemannian ProMPs are tested on toy examples to illustrate their workflow, and on real learning-from-demonstration experiments. | 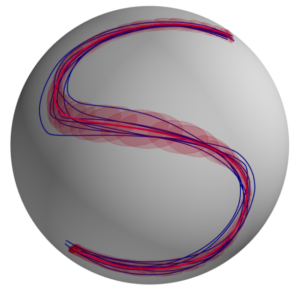 |
2021
|
Denz, R.; Demirci, R.; Cansev, E.; Bliek, A.; Beckerle, P.; Rueckert, E.; Rottmann, N. A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning Proceedings Article In: International Conference on Advanced Robotics , pp. 7, 2021. @inproceedings{Denz2021,
title = {A high-accuracy, low-budget Sensor Glove for Trajectory Model Learning},
author = {R. Denz and R. Demirci and E. Cansev and A. Bliek and P. Beckerle and E. Rueckert and N. Rottmann},
url = {https://cps.unileoben.ac.at/wp/ICAR2021Denz.pdf, Article File},
year = {2021},
date = {2021-12-06},
booktitle = {International Conference on Advanced Robotics },
pages = {7},
keywords = {Grasping, human motor control, Manipulation, smart sensors},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
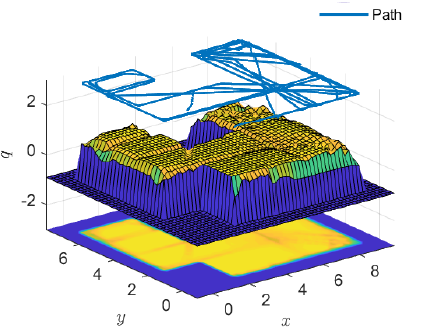
Rottmann, N.; Denz, R.; Bruder, R.; Rueckert, E. Probabilistic Approach for Complete Coverage Path Planning with low-cost Systems Proceedings Article In: European Conference on Mobile Robots (ECMR 2021), 2021. @inproceedings{Rottmann2021,
title = {Probabilistic Approach for Complete Coverage Path Planning with low-cost Systems},
author = {N. Rottmann and R. Denz and R. Bruder and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ECMR2021Rottmann.pdf, Article File},
year = {2021},
date = {2021-08-31},
booktitle = {European Conference on Mobile Robots (ECMR 2021)},
keywords = {mobile navigation, Probabilistic Inference},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2020
|
Akbulut, M Tuluhan; Oztop, Erhan; Seker, M Yunus; Xue, Honghu; Tekden, Ahmet E; Ugur, Emre ACNMP: Skill Transfer and Task Extrapolation through Learning from Demonstration and Reinforcement Learning via Representation Sharing Proceedings Article In: 2020. @inproceedings{nokey,
title = {ACNMP: Skill Transfer and Task Extrapolation through Learning from Demonstration and Reinforcement Learning via Representation Sharing},
author = {M Tuluhan Akbulut and Erhan Oztop and M Yunus Seker and Honghu Xue and Ahmet E Tekden and Emre Ugur},
url = {https://cps.unileoben.ac.at/wp/CoRL2020Akbulut.pdf},
year = {2020},
date = {2020-11-20},
urldate = {2020-11-20},
abstract = {To equip robots with dexterous skills, an effective approach is to first transfer the desired skill via Learning from Demonstration (LfD), then let the robot improve it by self-exploration via Reinforcement Learning (RL). In this paper, we propose a novel LfD+RL framework, namely Adaptive Conditional Neural Movement Primitives (ACNMP), that allows efficient policy improvement in novel environments and effective skill transfer between different agents. This is achieved through exploiting the latent representation learned by the underlying Conditional Neural Process (CNP) model, and simultaneous training of the model with supervised learning (SL) for acquiring the demonstrated trajectories and via RL for new trajectory discovery. Through simulation experiments, we show that (i) ACNMP enables the system to extrapolate to situations where pure LfD fails; (ii) Simultaneous training of the system through SL and RL preserves the shape of demonstrations while adapting to novel situations due to the shared representations used by both learners; (iii) ACNMP enables order-of-magnitude sample-efficient RL in extrapolation of reaching tasks compared to the existing approaches; (iv) ACNMPs can be used to implement skill transfer between robots having different morphology, with competitive learning speeds and importantly with less number of assumptions compared to the state-of-the-art approaches. Finally, we show the real-world suitability of ACNMPs through real robot experiments that involve obstacle avoidance, pick and place and pouring actions.},
keywords = {Deep Learning, movement primitives, Transfer Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
To equip robots with dexterous skills, an effective approach is to first transfer the desired skill via Learning from Demonstration (LfD), then let the robot improve it by self-exploration via Reinforcement Learning (RL). In this paper, we propose a novel LfD+RL framework, namely Adaptive Conditional Neural Movement Primitives (ACNMP), that allows efficient policy improvement in novel environments and effective skill transfer between different agents. This is achieved through exploiting the latent representation learned by the underlying Conditional Neural Process (CNP) model, and simultaneous training of the model with supervised learning (SL) for acquiring the demonstrated trajectories and via RL for new trajectory discovery. Through simulation experiments, we show that (i) ACNMP enables the system to extrapolate to situations where pure LfD fails; (ii) Simultaneous training of the system through SL and RL preserves the shape of demonstrations while adapting to novel situations due to the shared representations used by both learners; (iii) ACNMP enables order-of-magnitude sample-efficient RL in extrapolation of reaching tasks compared to the existing approaches; (iv) ACNMPs can be used to implement skill transfer between robots having different morphology, with competitive learning speeds and importantly with less number of assumptions compared to the state-of-the-art approaches. Finally, we show the real-world suitability of ACNMPs through real robot experiments that involve obstacle avoidance, pick and place and pouring actions. |  |
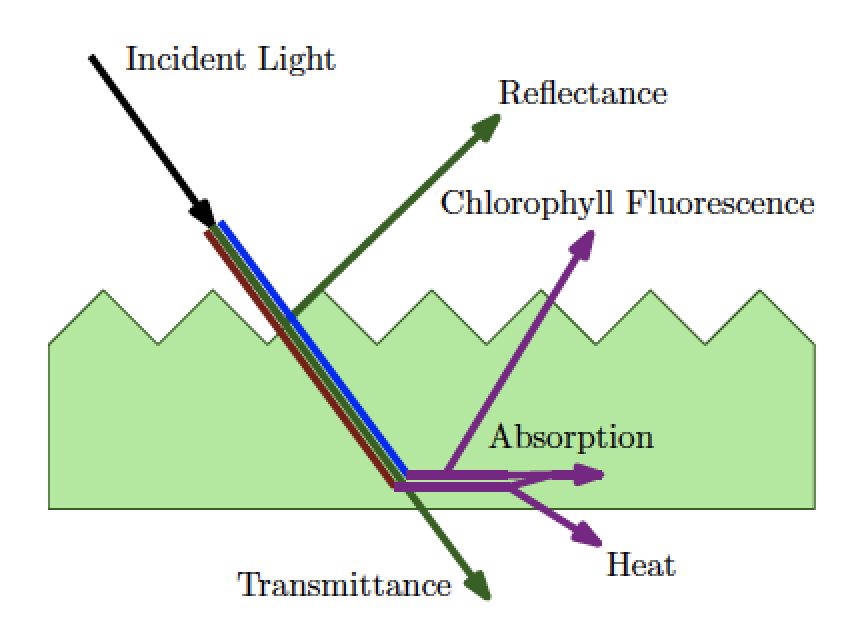
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. Exploiting Chlorophyll Fluorescense for Building Robust low-Cost Mowing Area Detectors Proceedings Article In: IEEE SENSORS , pp. 1–4, 2020. @inproceedings{Rottmann2020b,
title = {Exploiting Chlorophyll Fluorescense for Building Robust low-Cost Mowing Area Detectors},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IEEESensors2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-26},
booktitle = {IEEE SENSORS },
journal = { IEEE SENSORS 2020 Conference, to be held from October 25-28, 2020},
pages = {1--4},
keywords = {mobile navigation, smart sensors},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Rottmann, N.; Kunavar, T.; Babič, J.; Peters, J.; Rueckert, E. Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article In: International Conference on Intelligent Robots and Systems (IROS’ 2020), 2020. @inproceedings{Rottmann2020HiBO,
title = {Learning Hierarchical Acquisition Functions for Bayesian Optimization},
author = {N. Rottmann and T. Kunavar and J. Babič and J. Peters and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-25},
booktitle = {International Conference on Intelligent Robots and Systems (IROS’ 2020)},
keywords = {Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Rottmann, N.; Bruder, R.; Xue, H.; Schweikard, A.; Rueckert, E. Parameter Optimization for Loop Closure Detection in Closed Environments Proceedings Article In: Workshop Paper at the International Conference on Intelligent Robots and Systems (IROS), pp. 1–8, 2020. @inproceedings{Rottmann2020c,
title = {Parameter Optimization for Loop Closure Detection in Closed Environments},
author = {N. Rottmann and R. Bruder and H. Xue and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROSWS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-25},
booktitle = {Workshop Paper at the International Conference on Intelligent Robots and Systems (IROS)},
pages = {1--8},
keywords = {mobile navigation, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
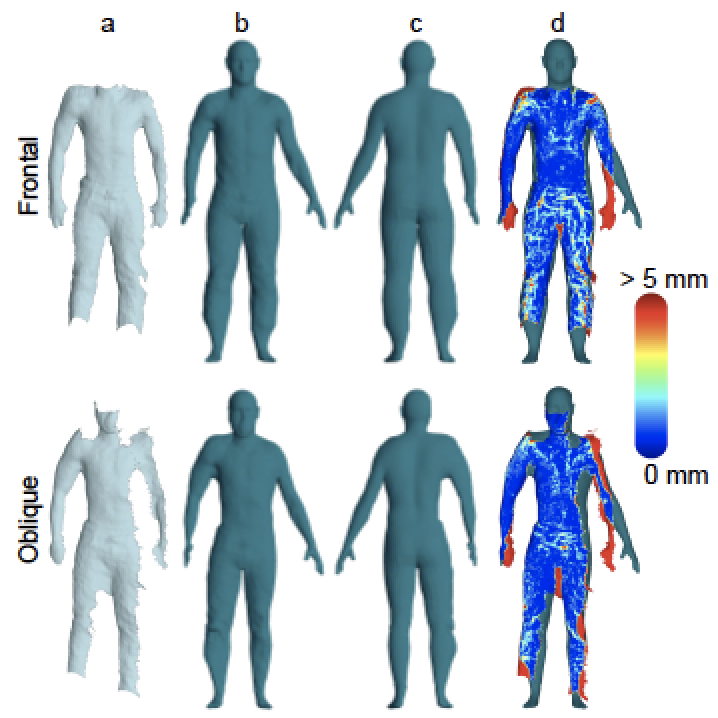
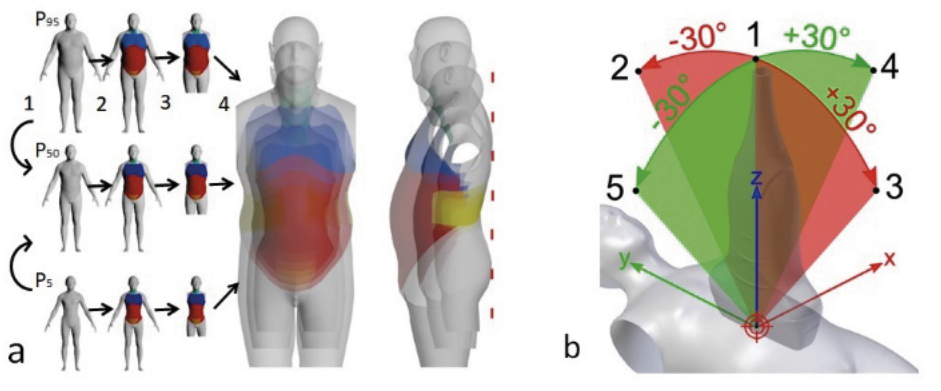
Tolga-Can Çallar, Elmar Rueckert; Böttger, Sven Efficient Body Registration Using Single-View Range Imaging and Generic Shape Templates Proceedings Article In: 54th Annual Conference of the German Society for Biomedical Engineering (BMT 2020), 2020. @inproceedings{Çallar2020,
title = {Efficient Body Registration Using Single-View Range Imaging and Generic Shape Templates},
author = {Tolga-Can Çallar, Elmar Rueckert and Sven Böttger},
url = {https://cps.unileoben.ac.at/wp/BMT2020Callar.pdf, Article File },
year = {2020},
date = {2020-09-20},
booktitle = {54th Annual Conference of the German Society for Biomedical Engineering (BMT 2020)},
journal = {Current Directions in Biomedical Engineering by De Gruyter},
keywords = {Medical Robotics},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Xue, H.; Boettger, S.; Rottmann, N.; Pandya, H.; Bruder, R.; Neumann, G.; Schweikard, A.; Rueckert, E. Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. @inproceedings{Xue2020,
title = {Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks},
author = {H. Xue and S. Boettger and N. Rottmann and H. Pandya and R. Bruder and G. Neumann and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ASPAI2020Xue.pdf, Article File},
year = {2020},
date = {2020-06-30},
booktitle = {International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020)},
keywords = {Manipulation, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2019
|
Stark, Svenja; Peters, Jan; Rueckert, Elmar Experience Reuse with Probabilistic Movement Primitives Proceedings Article In: Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019., 2019. @inproceedings{Stark2019,
title = {Experience Reuse with Probabilistic Movement Primitives},
author = {Svenja Stark and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2019Stark.pdf, Article File},
year = {2019},
date = {2019-11-03},
booktitle = {Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2019.},
keywords = {movement primitives, Reinforcement Learning, Transfer Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Boettger, S.; Callar, T. C.; Schweikard, A.; Rueckert, E. Medical robotics simulation framework for application-specific optimal kinematics Proceedings Article In: Current Directions in Biomedical Engineering 2019, pp. 1–5, 2019. @inproceedings{Boettger2019,
title = {Medical robotics simulation framework for application-specific optimal kinematics},
author = {S. Boettger and T.C. Callar and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/BMT2019Boettger.pdf, Article File},
year = {2019},
date = {2019-09-25},
booktitle = {Current Directions in Biomedical Engineering 2019},
pages = {1--5},
keywords = {Medical Robotics},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. Loop Closure Detection in Closed Environments Proceedings Article In: European Conference on Mobile Robots (ECMR 2019), 2019, ISBN: 978-1-7281-3605-9. @inproceedings{Rottmann2019b,
title = {Loop Closure Detection in Closed Environments},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ECMR2019Rottmann.pdf, Article File},
isbn = {978-1-7281-3605-9},
year = {2019},
date = {2019-09-04},
booktitle = {European Conference on Mobile Robots (ECMR 2019)},
keywords = {mobile navigation},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Rottmann, N.; Bruder, R.; Schweikard, A.; Rueckert, E. Cataglyphis ant navigation strategies solve the global localization problem in robots with binary sensors Proceedings Article In: Proceedings of International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS), Prague, Czech Republic , 2019, ( February 22-24, 2019). @inproceedings{Rottmann2019,
title = {Cataglyphis ant navigation strategies solve the global localization problem in robots with binary sensors},
author = {N. Rottmann and R. Bruder and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/Biosignals2018Rottmann.pdf, Article File},
year = {2019},
date = {2019-02-22},
booktitle = {Proceedings of International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS)},
address = {Prague, Czech Republic },
note = { February 22-24, 2019},
keywords = {constraint optimization, mobile navigation, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
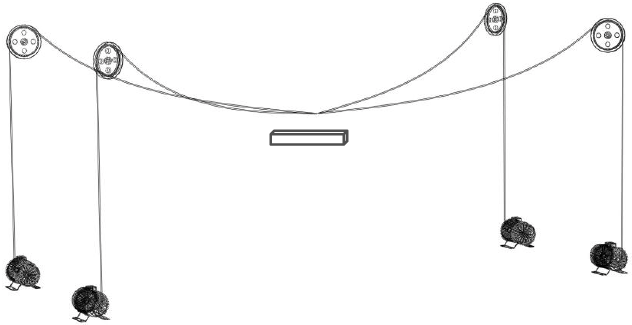
Rueckert, Elmar; Jauer, Philipp; Derksen, Alexander; Schweikard, Achim Dynamic Control Strategies for Cable-Driven Master Slave Robots Proceedings Article In: Keck, Tobias (Ed.): Proceedings on Minimally Invasive Surgery, Luebeck, Germany, 2019, (January 24-25, 2019). @inproceedings{Rueckert2019c,
title = {Dynamic Control Strategies for Cable-Driven Master Slave Robots},
author = {Elmar Rueckert and Philipp Jauer and Alexander Derksen and Achim Schweikard},
editor = {Tobias Keck},
doi = {10.18416/MIC.2019.1901007},
year = {2019},
date = {2019-01-24},
booktitle = {Proceedings on Minimally Invasive Surgery, Luebeck, Germany},
note = {January 24-25, 2019},
keywords = {Medical Robotics, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2018
|
Gondaliya, Kaushikkumar D.; Peters, Jan; Rueckert, Elmar Learning to Categorize Bug Reports with LSTM Networks Proceedings Article In: Proceedings of the International Conference on Advances in System Testing and Validation Lifecycle (VALID)., pp. 6, XPS (Xpert Publishing Services), Nice, France, 2018, ISBN: 978-1-61208-671-2, ( October 14-18, 2018). @inproceedings{Gondaliya2018,
title = {Learning to Categorize Bug Reports with LSTM Networks},
author = {Kaushikkumar D. Gondaliya and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/VALID2018Gondaliya.pdf, Article File},
isbn = {978-1-61208-671-2},
year = {2018},
date = {2018-10-14},
booktitle = {Proceedings of the International Conference on Advances in System Testing and Validation Lifecycle (VALID).},
pages = {6},
publisher = {XPS (Xpert Publishing Services)},
address = {Nice, France},
note = { October 14-18, 2018},
keywords = {Natural Language Processing, neural network, RNN},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2017
|
Rueckert, Elmar; Nakatenus, Moritz; Tosatto, Samuele; Peters, Jan Learning Inverse Dynamics Models in O(n) time with LSTM networks Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Humanoids2017Rueckert,
title = {Learning Inverse Dynamics Models in O(n) time with LSTM networks},
author = {Elmar Rueckert and Moritz Nakatenus and Samuele Tosatto and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Rueckert.pdf, Article File
https://cloud.cps.unileoben.ac.at/index.php/s/Pbny3MHBSaPKQA4, Dataset},
year = {2017},
date = {2017-11-15},
urldate = {2017-11-15},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p11091},
key = {goal-robots, skills4robots},
keywords = {inverse dynamics, model learning, RNN},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Efficient Online Adaptation with Stochastic Recurrent Neural Networks Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Tanneberg2017a,
title = {Efficient Online Adaptation with Stochastic Recurrent Neural Networks},
author = {Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Tanneberg.pdf, Article File},
year = {2017},
date = {2017-11-15},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p11092},
key = {goal-robots, skills4robots},
keywords = {intrinsic motivation, RNN, spiking},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
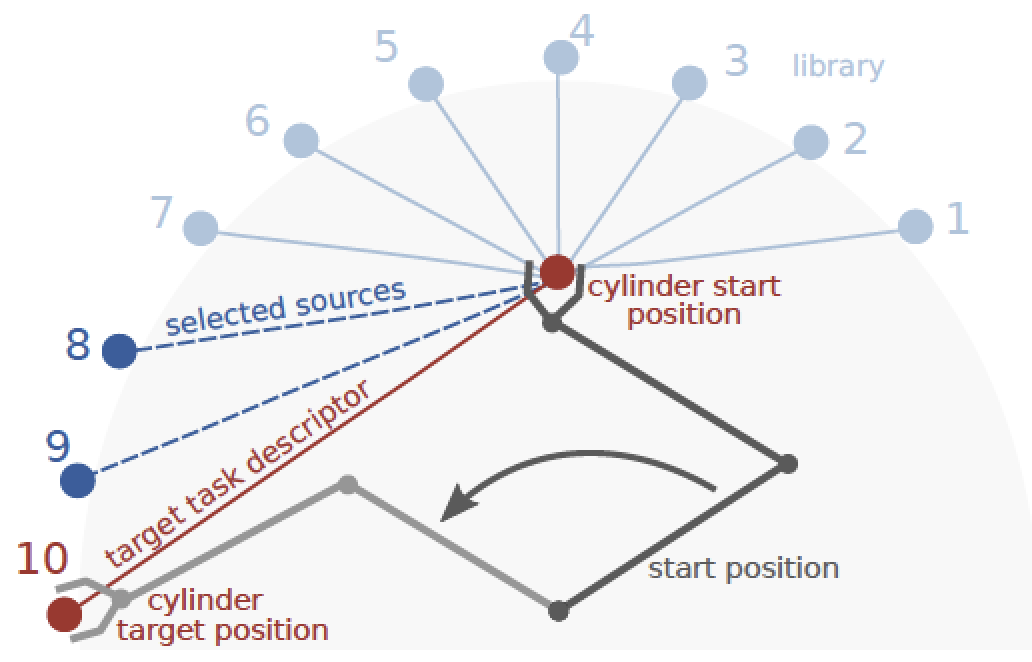
Stark, Svenja; Peters, Jan; Rueckert, Elmar A Comparison of Distance Measures for Learning Nonparametric Motor Skill Libraries Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Humanoids2017Stark,
title = {A Comparison of Distance Measures for Learning Nonparametric Motor Skill Libraries},
author = {Svenja Stark and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Stark.pdf, Article File},
year = {2017},
date = {2017-11-15},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p11093},
key = {goal-robots, skills4robots},
keywords = {intrinsic motivation, movement primitives},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Thiem, Simon; Stark, Svenja; Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Simulation of the underactuated Sake Robotics Gripper in V-REP Proceedings Article In: Workshop at the International Conference on Humanoid Robots (HUMANOIDS), 2017. @inproceedings{Thiem2017b,
title = {Simulation of the underactuated Sake Robotics Gripper in V-REP},
author = {Simon Thiem and Svenja Stark and Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2017Thiem.pdf},
year = {2017},
date = {2017-11-15},
booktitle = {Workshop at the International Conference on Humanoid Robots (HUMANOIDS)},
keywords = {Manipulation, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Tanneberg, Daniel; Peters, Jan; Rueckert, Elmar Online Learning with Stochastic Recurrent Neural Networks using Intrinsic Motivation Signals Proceedings Article In: Proceedings of the Conference on Robot Learning (CoRL), 2017. @inproceedings{Tanneberg2017,
title = {Online Learning with Stochastic Recurrent Neural Networks using Intrinsic Motivation Signals},
author = {Daniel Tanneberg and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/CoRL2017Tanneberg.pdf, Article File},
year = {2017},
date = {2017-11-10},
booktitle = {Proceedings of the Conference on Robot Learning (CoRL)},
crossref = {p11088},
key = {goal-robots, skills4robots},
keywords = {intrinsic motivation, RNN, spiking},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2016
|
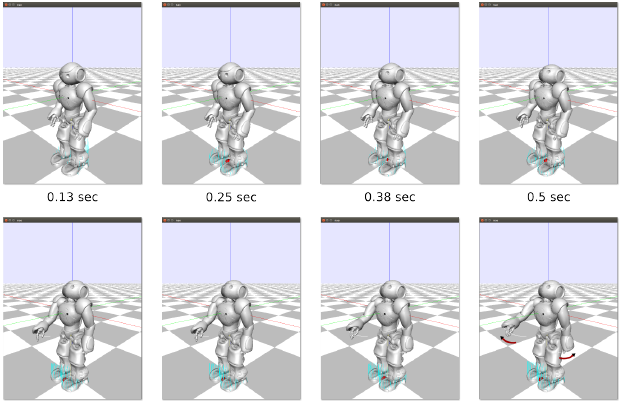
Tanneberg, Daniel; Paraschos, Alexandros; Peters, Jan; Rueckert, Elmar Deep Spiking Networks for Model-based Planning in Humanoids Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2016. @inproceedings{tanneberg_humanoids16,
title = {Deep Spiking Networks for Model-based Planning in Humanoids},
author = {Daniel Tanneberg and Alexandros Paraschos and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Humanoids2016Tanneberg.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/videos/humanoids_slower_540p.mp4, Supplementary Video},
year = {2016},
date = {2016-11-16},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10980},
key = {codyco and tacman},
keywords = {model learning, RNN, spiking},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Azad, Morteza; Ortenzi, Valerio; Lin, Hsiu-Chin; Rueckert, Elmar; Mistry, Michael Model Estimation and Control of Complaint Contact Normal Force Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2016. @inproceedings{Humanoids2016Azad,
title = {Model Estimation and Control of Complaint Contact Normal Force},
author = {Morteza Azad and Valerio Ortenzi and Hsiu-Chin Lin and Elmar Rueckert and Michael Mistry},
url = {https://cps.unileoben.ac.at/wp/Humanoids2016Azad.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_LocallyWeightedRegression_MEX_2015Rueckert.zip, MATLAB Code (fast LWR MEX-Function Implementation)},
year = {2016},
date = {2016-11-16},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10986},
key = {codyco},
keywords = {constraint optimization, human motor control, inverse dynamics, model learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
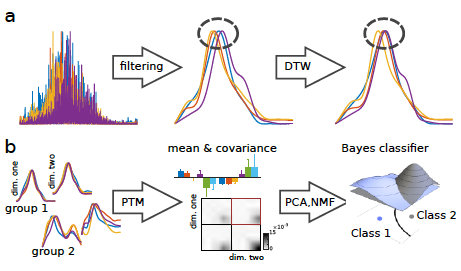
Kohlschuetter, Jan; Peters, Jan; Rueckert, Elmar Learning Probabilistic Features from EMG Data for Predicting Knee Abnormalities Proceedings Article In: Proceedings of the XIV Mediterranean Conference on Medical and Biological Engineering and Computing (MEDICON), 2016. @inproceedings{Kohlschuetter2016,
title = {Learning Probabilistic Features from EMG Data for Predicting Knee Abnormalities},
author = {Jan Kohlschuetter and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/KohlschuetterMEDICON_2016.pdf, Article File},
year = {2016},
date = {2016-01-01},
booktitle = {Proceedings of the XIV Mediterranean Conference on Medical and Biological Engineering and Computing (MEDICON)},
crossref = {p10898},
key = {codyco, tacman},
keywords = {graphical models, muscle synergies},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
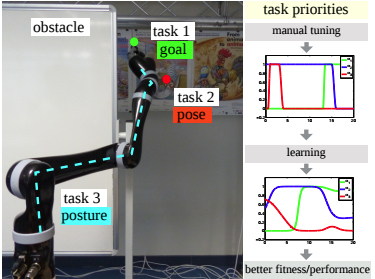
Modugno, Valerio; Neumann, Gerhard; Rueckert, Elmar; Oriolo, Giuseppe; Peters, Jan; Ivaldi, Serena Learning soft task priorities for control of redundant robots Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2016. @inproceedings{Modugno_PICRA_2016,
title = {Learning soft task priorities for control of redundant robots},
author = {Valerio Modugno and Gerhard Neumann and Elmar Rueckert and Giuseppe Oriolo and Jan Peters and Serena Ivaldi},
url = {https://cps.unileoben.ac.at/wp/ICRA2016Modugno.pdf, Article File},
year = {2016},
date = {2016-01-01},
booktitle = {Proceedings of the International Conference on Robotics and Automation (ICRA)},
crossref = {p10900},
key = {codyco},
keywords = {constraint optimization, policy search},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
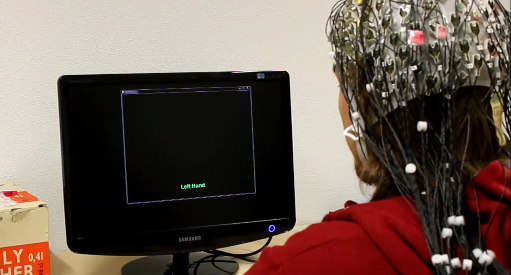
Sharma, David; Tanneberg, Daniel; Grosse-Wentrup, Moritz; Peters, Jan; Rueckert, Elmar Adaptive Training Strategies for BCIs Proceedings Article In: Cybathlon Symposium, 2016. @inproceedings{Sharma2016,
title = {Adaptive Training Strategies for BCIs},
author = {David Sharma and Daniel Tanneberg and Moritz Grosse-Wentrup and Jan Peters and Elmar Rueckert},
url = {https://cps.unileoben.ac.at/wp/Cybathlon2016Sharma.pdf, Article File},
year = {2016},
date = {2016-01-01},
booktitle = {Cybathlon Symposium},
crossref = {p10952},
keywords = {human motor control, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
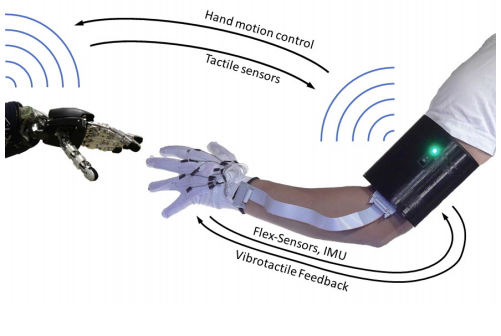
Weber, Paul; Rueckert, Elmar; Calandra, Roberto; Peters, Jan; Beckerle, Philipp A Low-cost Sensor Glove with Vibrotactile Feedback and Multiple Finger Joint and Hand Motion Sensing for Human-Robot Interaction Proceedings Article In: Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2016. @inproceedings{ROMANS16_daglove,
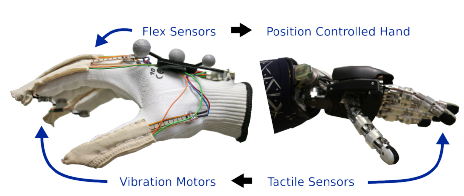
title = {A Low-cost Sensor Glove with Vibrotactile Feedback and Multiple Finger Joint and Hand Motion Sensing for Human-Robot Interaction},
author = {Paul Weber and Elmar Rueckert and Roberto Calandra and Jan Peters and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/ROMANS2016Weber.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_Arduino_SensorGlove_2015Rueckert.zip, MATLAB Code (JAVA Interface), ARDUINO Firmware
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_SensorGloveMexInterface_2015Rueckert.zip, MATLAB Code (MEX-Function Demo Interface)},
year = {2016},
date = {2016-01-01},
booktitle = {Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN)},
crossref = {p10949},
key = {codyco},
keywords = {graphical models},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2015
|
Calandra, Roberto; Ivaldi, Serena; Deisenroth, Marc; Rueckert, Elmar; Peters, Jan Learning Inverse Dynamics Models with Contacts Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2015. @inproceedings{Calandra2015,
title = {Learning Inverse Dynamics Models with Contacts},
author = {Roberto Calandra and Serena Ivaldi and Marc Deisenroth and Elmar Rueckert and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/ICRA15Calandra.pdf, Article File},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of the International Conference on Robotics and Automation (ICRA)},
crossref = {p10794},
key = {codyco},
keywords = {inverse dynamics, model learning, neural network},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Rueckert, Elmar; Mundo, Jan; Paraschos, Alexandros; Peters, Jan; Neumann, Gerhard Extracting Low-Dimensional Control Variables for Movement Primitives Proceedings Article In: Proceedings of the International Conference on Robotics and Automation (ICRA), 2015. @inproceedings{Rueckert2015,
title = {Extracting Low-Dimensional Control Variables for Movement Primitives},
author = {Elmar Rueckert and Jan Mundo and Alexandros Paraschos and Jan Peters and Gerhard Neumann},
url = {https://cps.unileoben.ac.at/wp/ICRA2015Rueckert.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_LatentManifoldPrimitives_2015Rueckert.zip, MATALB Code
https://cps.unileoben.ac.at/wp/resources/videos/KUKA_LatentManifold_ProMPs_REAL_Elmar.mp4, Supplementary Video},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of the International Conference on Robotics and Automation (ICRA)},
crossref = {p10796},
key = {3rdhand, codyco},
keywords = {movement primitives, Probabilistic Inference},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Paraschos, Alexandros; Rueckert, Elmar; Peters, Jan; Neumann, Gerhard Model-Free Probabilistic Movement Primitives for Physical Interaction Proceedings Article In: Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2015. @inproceedings{Paraschos2015,
title = {Model-Free Probabilistic Movement Primitives for Physical Interaction},
author = {Alexandros Paraschos and Elmar Rueckert and Jan Peters and Gerhard Neumann},
url = {https://cps.unileoben.ac.at/wp/IROS2015Paraschos.pdf, Article File},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS)},
crossref = {p10832},
key = {codyco},
keywords = {inverse dynamics, movement primitives},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Rueckert, Elmar; Lioutikov, Rudolf; Calandra, Roberto; Schmidt, Marius; Beckerle, Philipp; Peters, Jan Low-cost Sensor Glove with Force Feedback for Learning from Demonstrations using Probabilistic Trajectory Representations Proceedings Article In: ICRA 2015 Workshop on Tactile and force sensing for autonomous compliant intelligent robots, 2015. @inproceedings{Rueckert2015b,
title = {Low-cost Sensor Glove with Force Feedback for Learning from Demonstrations using Probabilistic Trajectory Representations},
author = {Elmar Rueckert and Rudolf Lioutikov and Roberto Calandra and Marius Schmidt and Philipp Beckerle and Jan Peters},
url = {https://cps.unileoben.ac.at/wp/ICRA2015Rueckertb.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_Arduino_SensorGlove_2015Rueckert.zip, MATLAB Code (JAVA Interface), ARDUINO Firmware
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_SensorGloveMexInterface_2015Rueckert.zip, MATLAB Code (MEX-Function Demo Interface)},
year = {2015},
date = {2015-01-01},
booktitle = {ICRA 2015 Workshop on Tactile and force sensing for autonomous compliant intelligent robots},
crossref = {p10831},
key = {codyco},
keywords = {graphical models},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2014
|
Rueckert, Elmar; Mindt, Max; Peters, Jan; Neumann, Gerhard Robust Policy Updates for Stochastic Optimal Control Proceedings Article In: Proceedings of the International Conference on Humanoid Robots (HUMANOIDS), 2014. @inproceedings{Rueckert2014,
title = {Robust Policy Updates for Stochastic Optimal Control},
author = {Elmar Rueckert and Max Mindt and Jan Peters and Gerhard Neumann},
url = {https://cps.unileoben.ac.at/wp/Humanoids2014Rueckert.pdf, Article File
https://cps.unileoben.ac.at/wp/resources/code/MATLAB_RobustStochasticOptimalControl_2015Rueckert.zip, MATLAB Code},
year = {2014},
date = {2014-01-01},
booktitle = {Proceedings of the International Conference on Humanoid Robots (HUMANOIDS)},
crossref = {p10768},
key = {codyco},
keywords = {policy search, Probabilistic Inference, SOC},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2013
|
Rueckert, Elmar; d’Avella, Andrea Learned Muscle Synergies as Prior in Dynamical Systems for Controlling Bio-mechanical and Robotic Systems Proceedings Article In: Abstracts of Neural Control of Movement Conference (NCM), Conference Talk, pp. 27–28, 2013. @inproceedings{Rueckert2013,
title = {Learned Muscle Synergies as Prior in Dynamical Systems for Controlling Bio-mechanical and Robotic Systems},
author = {Elmar Rueckert and Andrea d'Avella},
url = {https://cps.unileoben.ac.at/wp/Frontiers2013bRueckert.pdf, Article File},
year = {2013},
date = {2013-01-01},
booktitle = {Abstracts of Neural Control of Movement Conference (NCM), Conference Talk},
pages = {27--28},
crossref = {p10682},
keywords = {muscle synergies, policy search, Reinforcement Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2011
|
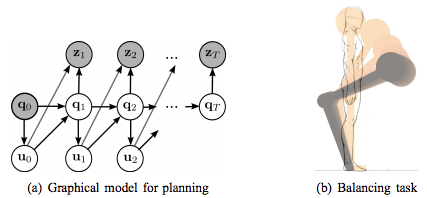
Rueckert, Elmar; Neumann, Gerhard A study of Morphological Computation by using Probabilistic Inference for Motor Planning Proceedings Article In: Proceedings of the 2nd International Conference on Morphological Computation (ICMC), pp. 51–53, 2011. @inproceedings{Rueckert2011,
title = {A study of Morphological Computation by using Probabilistic Inference for Motor Planning},
author = {Elmar Rueckert and Gerhard Neumann},
url = {https://cps.unileoben.ac.at/wp/ICMC2011Rueckert.pdf, Article File},
year = {2011},
date = {2011-01-01},
booktitle = {Proceedings of the 2nd International Conference on Morphological Computation (ICMC)},
pages = {51--53},
crossref = {p10680},
keywords = {graphical models, morphological compuation, Probabilistic Inference, SOC},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |

